VR中对物体重量的感知技术
对于宽松连接,不同重量的物体的引力强度也会不同。更轻的物体反应更快,更接近与直接连接的感觉。更重的物体的移动会滞后于控制器,而且需要更多的"力气"才能提起来。我们原先并不期待这种效果会很好——因为物体不能完全跟踪控制器的动作,这是虚拟现实的一个大忌。但是最后我们发现它的效果竟然出奇地真实。我们从中得出了两个心得:
我们在提起物体的时候仍然会显示控制器(保持对物体的完全追踪),避免用户感觉自己失去了对环境的直接控制。
当控制器接触到物体的时候,我们就将两者锁定在一起,形成一个直接连接。我们加入这个机制的原因是,我们发现重量感是在"捡起"动作发生的时候最有用,随后它就只能起到分散用户注意力的作用。
第二步:探索其他感官提示
除了捡起和抓取这两个机制外,我们觉得也有必要研究一下其他可以帮助反映物体重量的反馈形式。重量感可以通过两种形式体现:视觉反馈和触觉反馈。当控制器接近特定物体的张力临界值时,我们试图利用这两种反馈来加强用户所能感受到的"拉扯感"。
视觉反馈取决于连接的种类。对于直接连接,我们尝试了多种可以提示控制器速度的指示器。我们发现越简单的界面的效果会越好,于是我们决定使用基本的红绿指示器,并将其连接在控制器上,随着物体的速度逐渐到达临界值,指示器的颜色也会从绿色变成红色。在宽松连接中,控制器和物体之间就像是被一根"橡皮筋"连接着,所以指示器的颜色将能更加形象地反映出张力的变化。

指示器
在触觉反馈方面,我们将视觉指示器的逻辑应用在了控制器的振动上。当用户接近张力的临界值时,控制器的振动强度会加大。这种方式虽然简单,但很有效。
第三步:测试、调整、再测试
在如此多的影响因素之下,我们似乎有无数个需要测试的组合。所以为了更好地测试和比较不同的组合,我们开始在同一个环境中使用不同的配置,遵循先测试,再调整,然后在测试的原则。
最终,我们根据"捡起"这个动作,选定了一些最能反映出各种因素的影响的方法。这些方法之间的最要区别甚至还不是物理学规则的不同——它们主要体现在物理交互的视觉和触觉反馈。

直接提起物体连接到控制器,但通过静态碰撞器来固定。这是捡起东西最简单的形式,没有任何的重量模拟。
带触觉反馈的固定节点连接到控制器的物体在碰撞的时候会改变位置。如果控制器移动得太快,物体会由于自身的重力而掉落。在接近临界速度的过程中,控制器的振动会越来越强烈。
带视觉反馈的固定节点连接到控制器的物体在碰撞的时候会改变位置。如果控制器移动得太快,物体会由于自身的重力而掉落。在控制器接近临界速度的过程中,视觉指示器的颜色和读数会发生变化。
同时带视觉反馈和触觉反馈的固定节点连接到控制器的物体在碰撞的时候会改变位置。如果控制器移动得太快,物体会由于自身的重力而掉落。在控制器接近临界速度的过程中,视觉指示器的颜色和读数会发生变化,控制器的振动会越来越强烈。
张力物体通过张力牵引至控制器,当物体接近控制器的时候速度会增加。
速率(张力太大时连接会中断)物体越接近控制器,它的速度会越快。如果控制器与物体之间的张力超过临界值,物体会由于自身的重量而掉落。
速率(连接永远不会断开)物体越接近控制器,它的速度会越快,无论张力大小如何,物体永远都不会掉落。
此时,我们想听取一些来自团队外部的意见,看看什么因素是有帮助的,起反作用的,或者没必要的。
我们制作了两个用于用户测试的场景。我们可以看到下面两张图片,用户四周都设置了7个架子。在第一个场景中,每个架子前面都有一个物体,测试者可以采用不同的方法捡起这些物体,然后直接比较它们的感受。在他们逐一尝试这些方法的时候,我们会询问一系列的问题,如:哪一个物体感觉最重?如果你需要捡起大量物体,你最喜欢使用哪一个方法?哪一个方法的感觉最自然?
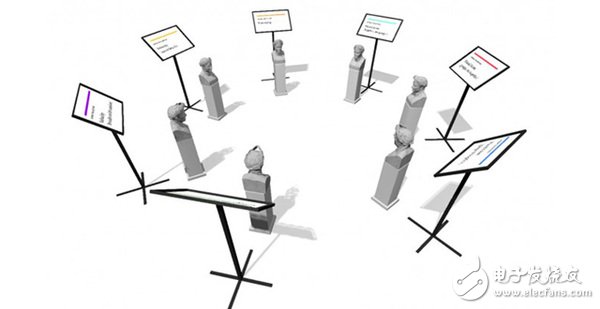
第二个场景中,我们在每一个架子前加入了多个轻重不一的物体。这样用户就可以了解到哪一种方法可以更好地表现出各个物体之间的重量差异,然后在相同的环境中比较其他方法的区别。

心得总结
虽然我们可以从用户测试中发现一些比较明显的倾向,但是没有得出一个普遍认可的最佳配置。但这也是我们意料之中的结果,对于这些实验,我们并不认为可以找到一个"正确"的答案。但从用户的回复中,我们还是总结出许多经验。
当连接可以断开时,宽松连接的效果最好
我们的测试者表示,这
VR眼镜 相关文章:
- 大部分VR开发者,都在用这些平台的硬件(07-26)
- 主流VR引擎大比拼:谁才是开发者首选?(07-11)
- 小米VR眼镜评测:49元玩具版VR盒子上手体验怎么样?(08-02)
- “vr眼镜”的分类及原理简介(11-07)
- LT3751如何使高压电容器充电变得简单(08-12)
- 三路输出LED驱动器可驱动共阳极LED串(08-17)