拆解HoloLens深扒AR产业底牌
近日来,除了火爆的VR消息不断,你会发现AR公司们更是频频爆出大笔的融资信息。尤其是投资者还是阿里、腾讯、联想、盛大这样的互联网巨头。
而国内外AR公司中,除了有Magic Leap这种自带吸金体制的魔性独角兽,也有HoloLens、EPSON等少数做出产品的公司,更有联想在端午小长假推出AR手机phab。
对于AR我们想问:
究竟难在哪里,为嘛你进度这么慢?VR和AR差别究竟有多大?AR的爆发离我们究竟有多远?我们推荐一篇来自莫尼塔的AR报告给你。上面的问题都会得到解答。
VR与AR的差别
我们先来直观对比一下二者的不同,从以下五个方面。

AR作为人工智能的一个分支,难点在于如何让计算机理解和重构3D世界,主要借助计算机视觉和深度学习等方式,对算法、软件要求比VR高。
VR实现的是完全虚拟世界的呈现,低延迟、高清晰度的显示和交互等是体验的重要指标。相对而言对硬件能力的要求比AR高,而且呈现的都是虚拟内容,内容制作环节难度大。
AR的技术难点
AR系统包括数据处理、3D注册、显示、人机交互等技术环节,通过摄像头获取真实环境信息,结合传感器进行定位跟踪、交互,通过显示设备生成虚拟场景,叠加到现实场景。

当前技术方面的最大阻碍是显示技术和三维注册–跟踪定位技术。其中,显示技术的突破对未来行业格局形成最为关键,消费刺激和行业关注未来会大大加速算法、技术的提升。
显示技术
互联网巨头在显示技术领域研究方向不同,更好的技术仍在研发中。
近眼眼镜实现3D有两种主要技术:Stereoscopic(立体)和Light Field(光场)。
Stereoscopic最大的问题是无法实现主动选择性聚焦,长时间佩戴会出现晕眩现象,但成像原理相对简单,目前现有头戴式基本采用这种方法,包括Hololens。
采用这种显示方式,光导透明全息透镜是主要难点。
第一,受限于制造工艺,提供面积大的镜片成本高、良率低,目前Hololens只能提供40°视野。
第二,镜片很厚,目前很多机构在研究如何让镜片变薄。
全球在"镜片变薄"方向的最新进展是:
2016年3月澳大利亚国立大学日前宣布制造出世界上最薄的透镜,仅有6.3纳米厚,是人头发丝直径的两千分之一。
美国航空航天局(NASA)官网报道,NASA 喷气推进实验室(JPL)与加州理工学院研究人员合作开发了一种超薄光学透镜,通过 "元表面"(metasurface)技术实现对光路的控制,可应用于先进显微镜、显示器材、传感器、摄像机等多种仪器,使光学系统集成度大大提高,并使透镜制造方式产生革命性变化。
产业界,以色列Lumus为代表的多个公司引入光导技术,但工艺复杂,目前还没有量产。
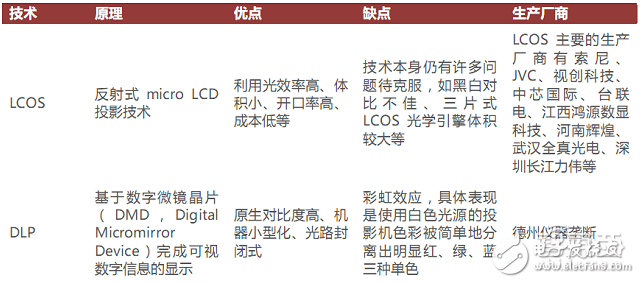
当前Hololens采用LCos投射技术(Google Glass也采用LCos),应用Himax的投影产品,但此前也有报道称Hololens采用TI DLP Pico进行显示研发,在投影领域DLP已经有较大的市场份额,而近年来,LCos技术进一步成熟,产业链也逐步扩大延伸,未来有很大的发展机会。下表简要对比了LCos技术与DLP技术的一些优缺点。我们在扩大化的LCos产业链中,看到了较多国内厂商的身影。
Light Field光场技术作为近眼3D的另外一大技术路线,其代表者就是Magic Leap。
这种方法的技术核心是光导纤维投影仪(Fiber Optic Projector),基于激光在光导纤维中传播后从纤维的端口射出时输出方向和纤维相切的原理,Magic Leap通过改变纤维在三维空间中的形状,特别是改变纤维端口处的切方向,控制激光射出的方向,直接投射到视网膜。

光场显示需要计算整个四维光场,其计算复杂度提高几个数量级,这是技术瓶颈之一。
同时,精确的调控机械部件,使得每一个纤维都稳定自然地颤动,并且颤动的模式要和数据传输相互同步,并且这种颤动不能受外界噪音的影响,这也是技术难点。
目前此技术还在实验室阶段,Magic Leap只有Demo,没有对应产品。

三维注册技术
三维注册过程通过实时检测用户头部位置和方向,确定要添加的虚拟内容在摄像机坐标系下的位置,包括标定(确定摄像头内部参数)、跟踪定位(确定虚拟内容相对位置)、虚实对齐等环节,人眼的敏感程度对注册精度提出了非常高的要求。

定位跟踪技术的四种方法

其中,目前跟踪定位技术的主流研究方向是SLAM(即时定位与地图构建,simultaneous localization and mapping),根据摄像头、传感器的信息,一边计算自身位置,一边构建环境地图,SLAM能够随时扩展使用场景,并且可以保证局部的定位精度,在机器人、虚拟现实和增强现
Magic Leap HoloLens VR 虚拟现实 Ar 相关文章:
- 新世纪玩物,国产智能LED灯详细拆解(03-18)
- 揭秘Magic Leap核心技术(05-29)
- 聊聊华为荣耀magic的石墨烯和快充技术(11-26)
- 华为荣耀Magic上手体验评测:更像一部人工智能设备(11-21)
- Leap Motion运行原理介绍(02-08)