Leap Motion运行原理介绍
定位与输入是VR技术的关键,leap MoTIon使用的是一种基于计算机视觉原理的识别技术。目前在业内比较有代表性的就是Leap MoTIon的手势识别技术,当然这并非Leap MoTIon独有的技术,hololens上同样搭载该技术。从 API 的角度大概说一下。
Leap MoTIon 传感器的结构:

大体上,Leap 传感器根据内置的两个摄像头从不同角度捕捉的画面,重建出手掌在真实世界三维空间的运动信息。检测的范围大体在传感器上方 25 毫米到 600 毫米之间,检测的空间大体是一个倒四棱锥体。
首先,Leap Motion 传感器会建立一个直角座标系,座标的原点是传感器的中心,座标的 X 轴平行于传感器,指向屏幕右方。Y 轴指向上方。Z 轴指向背离屏幕的方向。单位为真实世界的毫米。如图:

在使用过程中, Leap Motion 传感器会定期的发送关于手的运动信息,每份这样的信息称为"帧"( frame )。每一个这样的帧包含检测到的:
所有手掌的列表及信息;
所有手指的列表及信息;
手持工具(细的、笔直的、比手指长的东西,例如一枝笔)的列表及信息;
所有可指向对象(Pointable Object),即所有手指和工具的列表及信息;
Leap 传感器会给所有这些分配一个唯一标识(ID),在手掌、手指、工具保持在视野范围内时,是不会改变的。根据这些 ID,可以通过 Frame::hand( ) , Frame::finger( ) 等函数来查询每个运动对象的信息。
Leap 可以根据每帧和前帧检测到的数据,生成运动信息。例如,若检测到两只手,并且两只手都超一个方向移动,就认为是平移;若是像握着球一样转动,则记为旋转。若两只手靠近或分开,则记为缩放。所生成的数据包含:
旋转的轴向向量;
旋转的角度(顺时针为正);
描述旋转的矩阵;
缩放因子;
平移向量;
对于每只手,可以检测到如下信息:
手掌中心的位置(三维向量,相对于传感器座标原点,毫米为单位);
手掌移动的速度(毫米每秒);
手掌的法向量(垂直于手掌平面,从手心指向外);
手掌朝向的方向;
根据手掌弯曲的弧度确定的虚拟球体的中心;
根据手掌弯曲的弧度确定的虚拟球体的半径;
其中,手掌的法向量和方向如下图所示:

"手掌球"的圆心和半径:
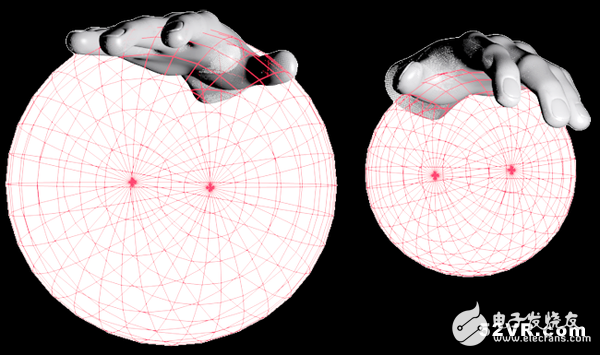
对于每个手掌,亦可检测出平移、旋转(如转动手腕带动手掌转动)、缩放(如手指分开、聚合)的信息。检测的数据如全局变换一样,包括:
旋转的轴向向量;
旋转的角度(顺时针为正);
描述旋转的矩阵;
缩放因子;
平移向量;
Leap 除了可以检测手指外,也可以检测手持的工具。像上文所说的,就是细的、笔直的、比手指长的物件:
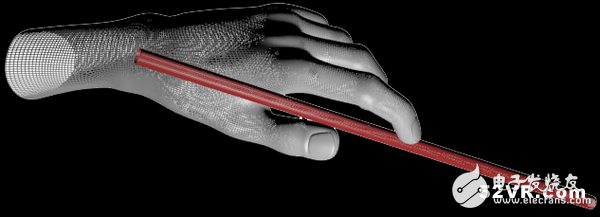
对于手指和工具,会统一地称为可指向对象(Pointable Object,抱歉不太会翻译),每个 Pointable Object 包含了这些信息:
长度;
宽度;
方向;
指尖位置;
指尖速度;
方向和指尖位置如下图:

根据全局的信息、运动变换,手掌、手指和工具的信息和变换,开发者就可以靠这些来制作游戏、程序了。
- 揭秘Magic Leap核心技术(05-29)
- 拆解HoloLens深扒AR产业底牌(05-22)
- 基于Motionchip的直流无刷伺服电机运动控制系统设计(04-19)
- iMOTION模块化应用设计套件(09-16)
- 基于FPGA的VRLA蓄电池测试系统设计(06-08)
- 飞思卡尔防夹车窗升降参考设计(02-14)