Daydream手柄是不是动捕?详解VR运动追踪技术101
按:到现在来写运动追踪技术101似乎有些晚,但还是想写,是因为关于VR的追踪技术时常看到会有各种混用,以致让人摸不着头脑。本文试图讲清楚关于追踪的一些基本理论和技术,已经很懂的各种业内大拿们可以无视。
在今年的I/O大会上,Google推出了Daydream VR平台的官方头盔设计参考,而且包含有一款手柄。关于这款手柄许多外媒(比如The Verge)称其为"Motion Controller"(体感控制器),也就是说它能捕捉你的动作,让你通过手势来进行操作。然而当小编称其为"动捕手柄"的时候,业内人士表示"这不是动捕,Google也没有称其为动捕"。

那么到底Daydream手柄是不是动捕呢?实际上,你可以称其为"动捕手柄",但又要明白它和其它产品是有区别的。下面就来看看动捕到底应该如何理解。
6自由度(DOF)
要理解Daydream手柄先要理解"自由度",这是经常会听到的一个词,英文叫"Degrees of Freedom,通常缩写为DOF"。
自由度指的就是物体在空间里面的基本运动方式,总共有6种。任何运动都可以拆分成这6种基本运动方式。这6种基本运动方式又可以分为两类:位移和旋转。
位移包括前后、左右、上下三种,如下图所示。

旋转包括:前后翻转(ROLL)、左右摇摆(PITCH)以及水平转动(YAW),如下图所示。
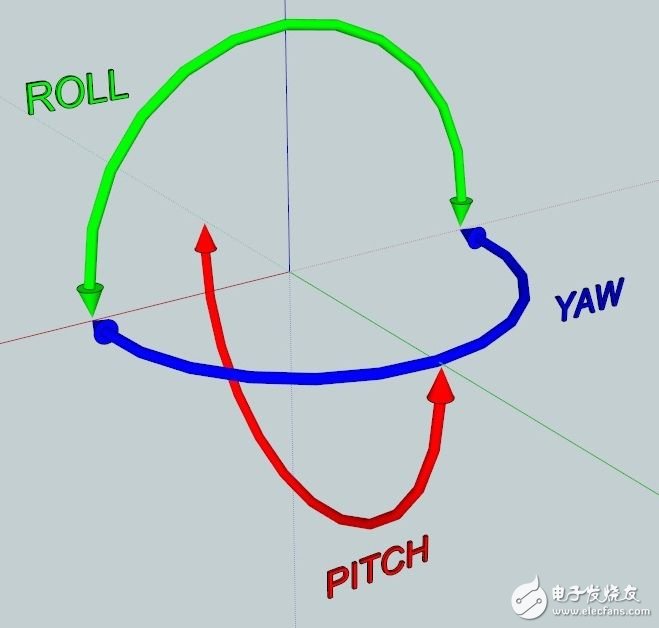
这两类,每类三个自由度,加起来就是6自由度。
在每个自由度里面,有两个不同的方向。比如升降电梯的运动只有一个自由度:上下,但在这个自由度里面它可以选择往上或者往下;同理,轮胎转动也只有一个自由度,但它可以选择顺时针还是逆时针转动。
任何硬的物体的运动,不管多么复杂,都可以用位移和旋转来解释(软的物体还有膨胀收缩等运动,比如气球)。例如,碰碰车只有3个自由度的运动:它可以在水平面转动或是前后、左右位移,但不能上下位移、前后翻转或左右摇摆(如果不发生事故的话)。
这个时候再来解释Daydream手柄就容易多了,首先它是动捕,但它只能追踪前后翻转、左右摇摆以及水平转动三个旋转的自由度,无法知道手柄在空间里的位移情况。所以,如果要准确描述Daydream手柄,就应该称其为3自由度或3DOF动捕手柄。
对比之下,HTC Vive的追踪系统让手柄拥有6个自由度,包括位移的3个自由度。其结果就是,你没法用Daydream的手柄做伸手拣地上物品这样的动作,但Vive的手柄可以。
下面两个视频分别演示的是Daydream手柄可以做的事情,以及Vive可以做但Daydream做不了的事情,都来自Google。
Daydream手柄演示,3自由度:
http://v.qq.com/boke/page/z/0/6/z03027aria6.html
Daydream Lab - 打鼓键盘(Drum Keys),6自由度:
http://v.qq.com/boke/page/o/0/8/o0302pcjyc8.html
IMU和惯性动捕
IMU是Inertial Measurement Unit的缩写,也就是惯性测量单元。它通常包含加速度计、陀螺仪和磁力仪三种传感器。以前主要用在飞机上,现在大部分智能手机都有了,成本比较低。使用IMU可以测量速度、方向和重力,这种动捕技术也就是我们常说的惯性动捕。
通过IMU可以很好地追踪物体3个旋转自由度的运动,Daydream手柄基本可以肯定用的就是IMU传感器了。而这也是为什么Google可以让开发者用一款Android手机来替代Daydream手柄进行开发,因为手机上也有IMU。
惯性动捕的问题是很难判断物体在空间里的绝对位置,因而位移运动的3个自由度无法被追踪。
光学动捕
除了惯性动捕,另一个常被提到的技术是光学动捕,或者是光学空间定位,通过精确的空间位置可以判断物体的位移及旋转。光学动捕有很多种,这里以带Mark点的技术为例。

Sensics dSight头显的红外Mark点
光学动捕通过一个或多个摄像头持续不断过地追踪物体上的Mark点,这些点以特定的模式排列,然后通过一系列的算法来判断出物体的位置。算法通过将已知Mark点的位置与物体上Mark点位置进行比对,判断出物体的绝对位置和旋转方向。
Mark点的数量、位置和排列是有科学依据的。例如,如果只用4个构成正方形的Mark点,就无法判断物体是不是倒过来了,或是旋转了90度。除此之外如果Mark点被挡住了或是受环境光影响而追踪不了,也会影响位置的判定。
此时通常要投入更多的摄像头和计算性能来进行持续和精确地追踪,导致成本大增。所以很多动捕技术方面提供商,比如诺亦腾,会采用光学和惯性动捕相结合的方式来实现6自由度的精确追踪,从而降低摄像头使用数量及对计算性能的需求,控制成本。
总结
各种用于VR的追踪技术,都是为了实现高精度、低成本的6
- 利用Dragonbaord 410c开发板搭建具有运动追踪功能摄像头(02-10)
- 谷歌DayDream移动VR平台是如何诞生的?(09-13)
- VR技术应用普及面临的八个障碍(09-17)
- VR利器惯性动作捕捉系统原理及优缺点解析(04-06)
- 基于FPGA的VRLA蓄电池测试系统设计(06-08)
- 飞思卡尔防夹车窗升降参考设计(02-14)