电动汽车EPS数字模型与电路原理分析
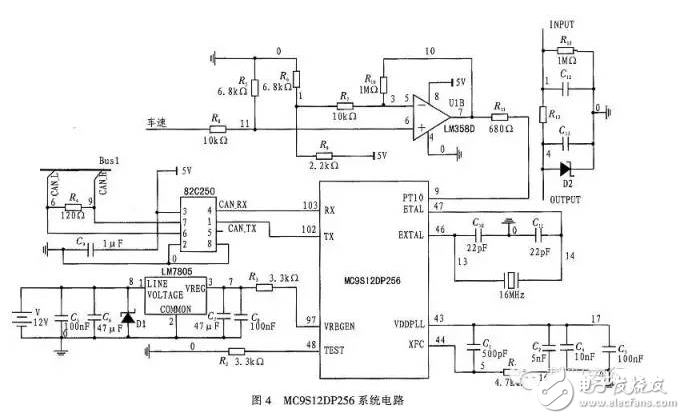
于单片机工作时管脚电压为+5 V供电,而车载电源电压为+12 V。因此,需要对+12 V电压进行转换,变成+5 V。本设计中采用7805电压转换芯片进行电压变换。
扭矩信号处理由于扭转传感器获得的是一些微弱的小信号,容易受干扰,因此需要对其进行滤波处理。本设计采用型滤波电路,R12取大电阻,提高输入阻抗。
车速处理电路车速信号为+12 V单极性方波,电压太高,不能直接用于单片机,需要将其变换为+5 V以内的方波。利用LM358对其进行处理,经转换后得到高电平为3.72 V,低电平为0.01V的方波信号。
CAN总线驱动电路MC9S12DP256内部集成了CAN总线控制器,CAN驱动电路只需要物理层驱动即可。本设计选用82C250芯片进行设计。
时钟电路时钟是单片机工作的基础。MC9S12DP256单片机内部集成了压控振荡器,可在其43、44和46、47引脚分别接上锁相环电路和16MHz的晶振电路。组成MC9S12DP256时钟电路,提供25MHz的时钟信号。
具体电路设计如图4所示。
4 系统软件设计
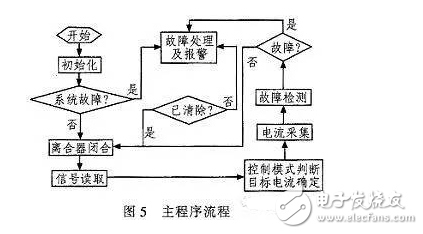
EPS控制软件采用模块化设计,包括进行系统初始化、信号采集、控制状态判、控制模式判断、PWM占空比计算、系统状态监控及保护、电流闭环模块、 通信模块等。EPS控制系统需要同时执行多个任务,为了保证系统的实时性和可靠性,采用中断服务方式,将整个软件部分分为主程序和中断服务子程序。主程序 设计流程如图5所示。
5 结束语
文中分析了汽车电动助力转向系统的工作原理。设计了直线型助力特性曲线,建立了增量式闭环PID控制策略,减小了芯片的计算量,增强了系统的助力跟 随性。利用MC9S1 2DP256单片机的丰富内部资源,简化了EPS硬件电路系统,降低了电路间的干扰,从而提升了系统可靠性,设计了基于MC9S12DP256的EPS控 制系统硬件电路,并给出了软件设计流程。本文设计的EPS系统可以编写多种EPS控制算法,有利于后续深入研究。对于控制性能的优化将在进一步的控制策略 研究和试验中进行。
- 高级驾驶辅助系统的采用即将出现改变(05-04)
- 瑞萨电子3大ADAS检测系统解决方案简述(02-08)
- 飞思卡尔多摄像头全景泊车辅助系统与ADAS产品(02-08)
- 本土主动安全潜力无限,知名厂商汽车安全精华(03-01)
- 强化射频与MCU性能 车用77GHz雷达性价比攀升(03-03)
- 基于视觉的ADAS解决方案,近在咫尺!(05-07)