喷涂机器人安全保护探讨
时间:03-11
来源:中国工控网
点击:
工件位置出现偏差入手。具体到涂装的轿车生产线来说,将双链的盖板位置加高,防止出现摩擦。加强对链条的检查及保养,保证链条处于较为平稳的运行状态。对于编码器的脉冲来说,采取编码器防波动措施。在硬件位置无法改变的前提下,通过软件控制(增加脉冲锁存)来达到编码器脉冲稳定的效果,进一步保证双链与滑撬之间处于同步运行状态。具体如下:

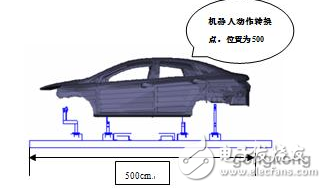
那么,如果真的已经出现了位置偏差,能否在机器人与工件发生碰撞之前检测出来呢?我们基于前几次发生的车身碰撞事件进行了深入分析。发现,之前出现的机器人车身碰撞位置均为机器人在进行路径、角度转换点。而每完成一个动作路径之后机器人都要等待到下一步动作的起始点。这样可以从这个起始点入手,制定防撞方案。
如下所示:机器人进行角度转换点为12500px,下一步动作起始点为13000px处。
4、结束语
机器人静电喷涂系统较为复杂,成本投入较大。随着工业机器人的广泛应用,只有在保证设备安全的前提下才能使其发挥更大的作用。不同的现场有着不同的安全防范措施,只有适时适地的保护才会起到作用。
- 先进手术系统所需的独特电源需求,凌力尔特来接招(10-11)
- 3G/WIFI控制太阳能驱动机器人制作详解(10-28)
- 超声波移动机器人导航设计方法(04-11)
- ROCKWELL系统在机器人汽车焊装线上的应用(07-07)
- 智能机器人在家庭医疗保健的设计和应用(09-19)
- 基于DSP和机器人的声控系统设计与实现(02-21)