实现强大的车载智能安全行驶仪设计
为了进一步提高汽车驾驶的安全,文中介绍基于INEMO设计了车载智能安全行驶仪设计,本系统对汽车行驶过程中的信息进行采集,分析不安全因素并作出预警,同时对驾驶员操作作出提示。并且通过与周围车辆的信息共享分析行驶环境,若存在不安全车辆及时发出警示。
一、项目概述
汽车行驶过程中,有些不安全因素的信息驾驶员很难捕捉到,如车胎的温度和压力变化等,对于驾驶新手来说,当汽车在转弯或者是在不平坦的路面上行驶时,由于操作不熟练易发生事故。有些事故是由于驾驶员疲劳驾驶从而对周围车辆行驶环境无法作出判断而引起的。事故发生后,由于求救不及时也导致了进一步的生命和财产损失。

因此,为了进一步提高汽车驾驶的安全,本文介绍基于INEMO设计了车载智能安全行驶仪设计。本系统检测本车辆行驶情况,并与装有该系统的周围车辆无线通信和进行数据共享,由此对车辆可能存在的不安全因素进行评估分析,进而为驾驶员提供参考信息,并对不安全的驾驶行为作出报警,本系统还可以通过 GSM等方式与其他公共管理平台或个人手机等进行数据传输,从而可以为驾驶员提供更多的信息和服务。另外本系统可存储车辆行驶的信息,以此可作为驾驶模拟和事故分析等,可认为是汽车的"黑匣子"。
二、需求分析
2.1 功能要求
本系统功能可分成以下三个方面
1)自身车辆行驶状态检测:通过检测汽车行驶情况,包括车速、汽车直线加速度、垂直加速度(即路面状况)、转弯情况、轮胎温度和压力、车内外的大气温度和压力等。为驾驶员提供驾驶提示信息,避免不适当操作。所有数据都可以记录存储。
2)车车互联信息共享:系统检测一定范围内是否存在相同系统,与其进行信息共享,并对车辆的行驶状态进行分析,对可能造成不安全驾驶和隐患进行报警,保持车辆安全距离,防止追尾等事故发生。
3)事故的处理:事故一旦发生,驾驶员按一键即可报警和向他人求救(手机短信方式),若不能主动发出求救,系统应具有自动判别事故发生的功能,把出事地点等情况发出。
2.2 性能标准
根据系统功能要求,提出以下标准。
1)在汽车信息检测方面
1.轮胎温度和压力检测,采集频率10Hz,四个轮胎都要检测,要求实时准确。
2.可计算出车辆行驶速度,误差不超过2km/h。
3.检测出汽车转弯时角度,计算出转弯半径,对汽车是否侧翻和漂移作出判断。
4.保证记录24小时行驶信息(存储间隔长),以及10分钟的详细短间隔存储。
2)车车互联方面
保证通信可靠,信息交换频率在每秒10次以上。
3)事故处理方面
1.事故发生后系统应能继续可靠工作,能够及时准确发出信息
2.求救信息可以不断发出,直到接收到援助
3.自动判定事故程序误报率在10%以下
三、方案设计
3.1 系统功能实现原理
系统可以分为五个主要模块:传感器采集和处理;车车通信和车网通信;主处理和判定程序;报警、提示交互服务界面;数据存储和传输。
传感器采集汽车四个轮胎以及车内外的大气的温度和压力;加速度传感器根据安装位置和方向不同可测出汽车直线行驶加速度和垂直加速度,得到汽车行驶和路面状况;陀螺仪可测出路面的坡度和车辆转弯的角度等。主处理和判定模块是对当前自身车辆行驶信息和其他车辆信息进行分析,并作出判定,根据判定结果作出相应的报警和界面提示显示等。系统可对采集和处理的数据进行存储,并可以传输给上位机。上位机软件可以根据这些信息完全模拟出车辆之前的行驶路径过程等,为事故分析等。
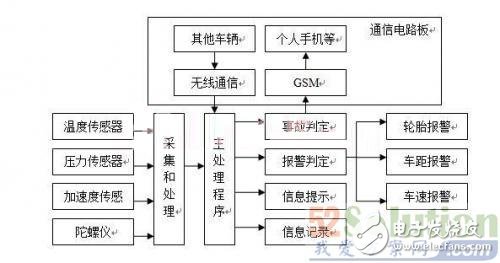
图1:系统硬件结构框图
3.2 硬件资源配置
1.附件电路板:通信和存储电路板:无线接口(车车互联),GSM(信息上传),串口(用于调试),CAN(与汽车ECU的通信),存储器等
2.界面显示电路板:LCD12864液晶,报警器等
3.主控制板:基于微控制器芯片STM32F103RE的电路板
4.传感器:LSM303DLH6,LY330ALH,LPR430A,数字温度传感器ADT7420,压力传感器
3.3系统软件架构
在本系统软件中,有以下几个子程序
1.传感器信号处理:采集角度,加速度,温度压力等模拟信号并处理为可应用参数值。
2.读取其他车辆信息:通过与通信电路板之间的接口读取检测到的其他车辆信息。
3.主处理程序,主要包括了轮胎温度压力检测程序,根据路面颠簸情况对车速进行判定的程序,根据其他车辆行驶情况对车距判定的程序,根据车辆转弯角度等情况对转弯操作进行判定的程序以及车辆是否发生事故的判定程序。如果超过预设的判定值作出相应的处理。
4.事故发生应急
- 车联网时代:汽车互联技术大盘点(04-28)
- LT3751如何使高压电容器充电变得简单(08-12)
- 三路输出LED驱动器可驱动共阳极LED串(08-17)
- 浪涌抑制器IC简化了危险环境中电子设备的本质安全势垒设计(08-19)
- 严酷的汽车环境要求高性能电源转换(08-17)
- 适用于工业能源采集的技术 (08-10)