基于机器视觉的汽车智能驾驶系统
参数就可以。
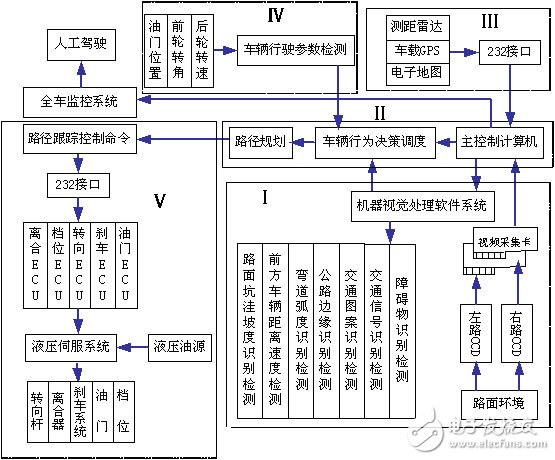
图2 智能驾驶系统结构框图
(2) 主控制系统
整个智能驾驶系统的核心是主控制系统,它负责各种传感器的信息采集、识别,然后进行处理,最后依据处理后的信息进行车辆行为决策调度,规划路径并生成汽车控制命令。本文整个智能驾驶系统的设计思想也是基于模拟人工驾驶来进行的,主控制系统是汽车的大脑,机器视觉系统好比人的双眼。主控制系统一旦出现系统死机或者控制软件运行不稳定,则会带来车毁人亡的重大交通事故。而主控制系统计算机工作环境恶劣,汽车在高速行驶的时候震动很大,靠近汽车引擎的部位温度较高,为了保证主控制系统的安全稳定的运行,主控制系统计算机应该选用高性能高稳定的工控机。
(3) 辅助测距定位系统
主要包括车载GPS定位系统、测距雷达、电子地图等。随着交通信息化的发展,基于GIS的电子地图已经开始应用在日常汽车驾驶中。基于GIS的电子地图它包括了大范围层次的地理位置信息,可以利用它来设定大的方向上的汽车驾驶的宏观路径。然后通过车载GPS全球定位系统来确定汽车当时位置点的地理位置信息,把它跟电子地图上该点的地理位置信息比较,就可以知道汽车现在处于我们设定的宏观路径中的什么位置,可以防止汽车在自动驾驶的时候走错路口,走错方向,偏离预先设定的宏观路径。基于GIS的电子地图和车载GPS全球定位系统的综合运用,保证了汽车能在宏观上按照我们预先设定的宏观路径进行自动驾驶而不偏离我们预先设定的路径。
车载测距雷达主要是辅助机器视觉系统在一些特殊的环境下测定前方车辆的速度和距离,以及路面障碍物的距离。因为跟人一样,由双CCD构成的立体视觉系统在天阴、大雾、暴雨等能见度不好的条件下,对前方车辆障碍物的识别效果会有很大的降低,测定车辆(障碍物)速度和距离更存在精度上的误差,不能测定能见度外的前方车辆和障碍物。而车载测距雷达可以在天气晴好的时候辅助立体视觉系统提高测量车辆(障碍物)的距离精度和测量车辆(障碍物)速度的精度,在恶劣天气可以弥补立体视觉测量效果不好的缺点,提高系统的可靠性。
(4) 车辆行驶参数检测系统
车辆行驶参数检测系统的主要作用是检测汽车的前轮转角、后轮速度、油门大小等车辆行驶状态的关键参数,为主控制系统进行车辆决策调度和路径规划提供参数。这个系统相对简单,车辆行驶状态参数都被车辆仪表检测出,只要想把这些参数读取到主控制系统就可以。
(5) 执行机构
整个车辆的自动驾驶执行机构主要是电液压伺服系统,由多个伺服油缸来完成各种驾驶汽车的动作,它模仿人类驾驶汽车的动作,推拉各操纵杆,完成汽车换档、加速、减速、转向、停车、熄火等一系列工作。控制电液压伺服系统的核心部件是离合器ECU(electronic control unit),档位ECU,转向ECU,油门ECU,刹车ECU这五个各司其职的电子控制器(ECU)来接收并执行主控制计算机经过决策调度计算后发出的控制命令,命令的执行主要是靠ECU把命令信号放大然后送达电液压伺服系统进行机械执行。
4、结语
智能驾驶中的机器视觉技术是一项很复杂的技术,它需要进行更多更细致的研究。目前的难点和重点主要集中在快速有效的立体配对、道路环境的快速三维重建和机器视觉处理的实时性上,有很多科学家已经在这方面进行了深入的研究,新的研究成果无疑讲推动机器视觉技术在智能驾驶中引用。
- Atmel针对工业机器视觉应用推出快速CMOS相机(10-22)
- 工业机器视觉系统市场迅猛发展,行业应用新视点逐步扩大(11-06)
- 基于DSP和FPGA的机器视觉系统设计与实现(03-07)
- Xilinx用于工业自动化的机器视觉解决方案(11-30)
- Xilinx多协议机器视觉摄像机参考设计(12-01)
- 德州仪器(TI)3D机器视觉参考设计(11-30)