深度学习在无人驾驶环境感知中的应用方案

机器深度学习是近年来在人工智能领域的重大突破之一,它在语音识别、自然语言处理、计算机视觉等领域都取得了不少成功。而对于当前大热的无人驾驶,深度学习可以带来哪些突破性应用?
由于车辆行驶环境复杂,当前感知技术在检测与识别精度方面无法满足无人驾驶发展需要,深度学习被证明在复杂环境感知方面有巨大优势。
近日,针对这一话题,北京航空航天大学交通学院副教授余贵珍,在2016年中国汽车工程学会暨展览会期间与广大汽车专业人士分享了他对于深度学习在无人驾驶环境感知中应用的体会和心得。余贵珍的研究方向主要是智能交通和无人驾驶的感知和控制。
视觉感知是无人驾驶的核心技术
无人驾驶一般包括四个等级或者五个等级,不管哪个等级都会包含环境感知、规划决策和执行控制等三个方面。其中环境感知方式主要有视觉感知、毫米波雷达感知和激光雷达感知,其中的视觉感知是无人驾驶感知的最主要的方式。
最近炒得比较热的特斯拉事件,一个是发生在美国,另外一个发生在中国,我想从技术的角度来谈谈。
在美国事件中,特斯拉车上的毫米波雷达因为安装的位置较低,无法检测卡车高的车厢,摄像头应该能检测到卡车了,我们知道特斯拉车辆是从远到近的过程中,所以从这个角度一般能够检测到卡车的。但是最后融合起来的时候可能出现了问题,没有检测到卡车。
在中国发生的事故,由于前车突然变道,故障车辆离特斯拉比较近,都在视觉感知和雷达的盲区,毫米波雷达由于前面角度的问题,无法扫描到近距离的侧向车。另外由于故障车的部分出现在摄像头中,视觉感知也没有办法检测到,发生了特斯拉这种刮蹭事故。
所以从以上事故可以看出,视觉感知仍然需要完善。
而中国的路况较为复杂,雨天、雾霾天以及下雪天。另外,像马车、吊车以及摩托车,还有摩托车拉猪、卡车拉树的现象在我们生活中经常遇到,这些场景对视觉是一个难题,提高这种复杂路况下的感知精度是无人驾驶研究的挑战。
深度学习能够满足复杂路况下视觉感知的高精度需求
深度学习被认为是一种有效的解决方案,深度学习是模拟人的大脑,是近10年来人工智能取得一个较大的突破。深度学习在视觉感知中近几年应取得了较大的进展,相对于传统的计算机视觉,深度学习在视觉感知精度方面有比较大的优势。
特别是2011年以后,有报导指出深度学习如果算法和样本量足够的话,其准确率可以达到99.9%以上,传统的视觉算法检测精度的极限在93%左右。而人的感知,也就是人能看到的准确率一般为95%,所以从这个方面看,深度学习在视觉感知方面是有优势的。
所谓深度学习,又名深度神经网络,相对于以前的神经网络来说是一种更多层和节点的神经网络机器学习算法,从这儿可以看出来,其实深度学习是一种机器学习,可以说是一种更智能的机器学习。深度学习主要类型一般包括5种类型,像CNN、RNN、LSTM、RBM和Autoencoder,其中我们主要的是用的CNN,CNN另外一个名字叫卷积神经网络。卷积神经网络已经被证明在图像处理中有很好的效果。
其中,自学特征是深度学习的最大优势。例如智能驾驶需要识别狗,在以前的算法中如果要识别狗,对狗的特征要用程序来详细描述,深度学习这个地方如果采集到足够的样本,然后放在深度学习中训练,训练出来后的系统就可以识别这个狗。传统的计算机的视觉算法需要手工提取特征,很多时候需要专家的知识,算法的鲁棒性设计非常困难,很难保证鲁棒性,我们做视觉感知的时候就遇到很多困难。另外如果要保证这个稳定需要大量的调试,非常耗时。
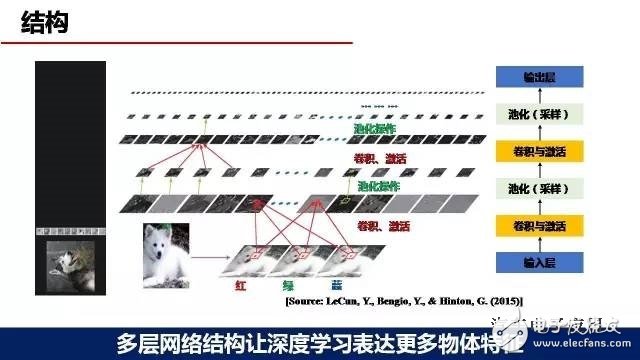
深度学习一般包括四种类型的神经网络层,输入层、卷积层、池化层、输出层。网络的结构可以10层甚至上百层,一般层数越多检测精度会更精准。并且随着网络层数和节点数的增加,可以表达更细、更多的识别物的特征,这样的话可以为检测精度的提高打下基础。
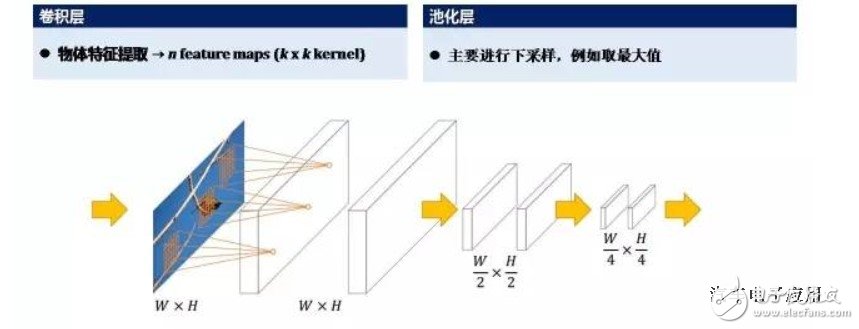
其中卷积层和池化层是深度学习的核心处理层。卷积层主要是用于负责物体特征的提取;池化层主要是负责采样。比如简单理解池化层,(就是一个数独里面取一个最大值),这就是池化层。卷积层与池化层是深度学习两个核心的层。
深度学习工作的原理,深度学习一般包括两个方面,一个是训练,
- 汽车无人驾驶传感器平台大盘点(02-02)
- 自动驾驶距离我们还有多遥远?(02-16)
- 机器人时代:无人驾驶的野心(02-16)
- 多功能导盲车系统设计与实现(02-02)
- 智能汽车电子控制单元该如何简化(02-19)
- 汽车应用标准之争 凸显LIN竞争优势(02-24)