无人驾驶实现真正的商业化,还有多少路要走!
径的预测,这两条路径将在2020年开始融合,并预计在2030年最终实现城市环境的无人驾驶。
一是,车辆本身实现高度智能化能应变各种的环境条件;
二是,车与车、车与交通的联网,通过智慧交通规划实现无人驾驶。
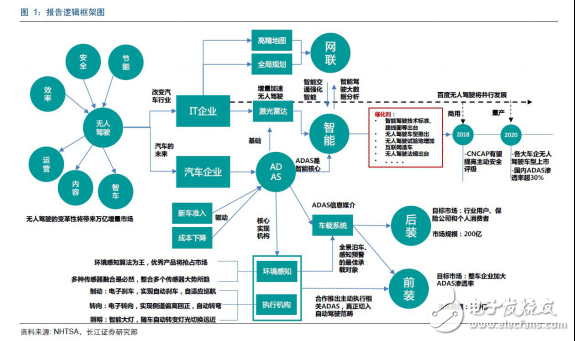
图8
传统汽车智能化:采用高精度传感器使得汽车具有感知周边驾驶环境的能力,具有强大的计算芯片及核心算法针对不同的环境得出相应的驾驶策略,最后使用相应的执行系统进行物理操作。
道路交通智慧化:"车联网+智能交通"为终极模式,主要分为两个部分:车与车之间通信,信息包括 速度、位置、驾驶方向、刹车等;车与交通系统之间通信,信息包括实时路况、道路信息、行人信息等。
在此情况下,将极大提升整个交通系统的驾驶安全性及交通效率,与车辆智能化形成良好的协同效应。但目前实现仍有困难,比如车辆通信数据标准仍不统一、无线通讯技术较难满足响应速度要求、智能交通基础投入较大等等。
实现ADAS,传感融合是基础
随着车载自动程度不断提高,对安全和可靠性的要求日益增加时,多个传感器融合是实现自动驾驶性能最佳解决方案的必然趋势,例如AEB的技术中采用超过10种以上的传感器组合方案。
视觉系传感器组合拥有实现传统雷达能实现功能的潜力,正在逐步提高渗透率。目前仍然占据前视和后视绝大部分市场,如自适应巡航、自动泊车等均是以雷达组合的方式实现。预计2019年中短距雷达将达到3400万颗,是目前需求量的近三倍。
不仅如此,多种ADAS的重要功能都无法脱离视觉系传感器,这将带来摄像头传感器的旺盛需求。前年车载摄像头的需求量约为3600万颗,预计到2019年,摄像头传感器的需求量将达到9300万颗,2020年平均每辆车都将装备超过一个摄像头。
结语:完全无人驾驶由于受到技术、法规等限制尚需时日,车辆智能化的发展将从ADAS开始,并逐步提升其应用能力和操作权限,最终实现完全无人驾驶。发展无人驾驶的重要意义是,创造出一款完全自主的汽车,并且这些车辆将实现一个没有交通事故的世界。
- 汽车无人驾驶传感器平台大盘点(02-02)
- 自动驾驶距离我们还有多遥远?(02-16)
- 机器人时代:无人驾驶的野心(02-16)
- 多功能导盲车系统设计与实现(02-02)
- 智能汽车电子控制单元该如何简化(02-19)
- 汽车应用标准之争 凸显LIN竞争优势(02-24)