赛灵思、ADI、瑞萨电子等ADAS解决方案TOP8
ture技术,管理视频传送和摄像机控制,可将所需通信带宽降至不到100 Mbps ,汽车通常需要4或5条低压差分信号电缆来传输视频数据,每条电缆的价格约合10美元。
飞思卡尔高级产品经理郗蕴侠表示,"飞思卡尔目前的成熟客户包括BOSCH, CONTI, TRW, Valeo, Denso,Delphi 等。"同时,她也指出,"ADAS技术面临的挑战包括提高芯片本身具有处理图像,复杂应用的快速高容量计算处理能力;需要消耗较低功率以避免散热问题;尺寸要小,使得和系统其他器件紧密结合,以便安装。总体需求就是要快速处理,高容量,低功耗,小尺寸。"
4.富士通360度全景系统方案
富士通的ADAS技术主要涉及透过摄像头和传感器的结合,实现图像识别辅助和接近目标检测,应用的领域主要有360度三维立体全景辅助、可视停车辅助、驾驶盲区监控、安全开车门以及车行驶方向周围的障碍物和行人的识别。目前,富士通的合作伙伴采用Emerald核心芯片MB86R11可以提供turnkey 量产方案。富士通的360度全景系统方案,采用3D的建模和独特图形合成算法,围绕车身四周可构建多个虚拟三维立体视角,结合车身CAN总线做到自动视角动画的缩放和切换。作为驾驶员的视觉辅助,汽车上配备了4个摄像机影像的合成系统,但是以往的技术只能做二维图像合成,因而只能进行特定视角的显示。而360度全景系统方案能将来自4个摄像机的影像合成到三维模型上,从而可以从任意视角显示全方位场景。以往的系统将摄像机影像投影到二维平面上,只能表现从上方观看的俯视图,有时难以分辨周围的车辆和行人。而360度全景系统,则是将影像投影在立体曲面上,可以任意变换观看角度,能完整表现出希望看到的场景,从而提高了可辨识性。在接近目标图像检测的技术方面,富士通运用灵活的时间帧来采集2个不同的图形,能够检测大约60米元的目标,传统的图形识别只能做到20米。富士通的ADAS应用包括可视辅助和识别辅助。可视辅助给驾驶人员提供更为立体的广泛视角范围,减少视角盲区范围;识别辅助对后方或者侧面接近的目标进行检测,提醒驾驶人员变道的潜在危险,也可以做到停车后提示是否适合安全开车门。
由于MB86R11芯片本身集成了高性能的图形处理和中央处理器、存储器控制器,通过硬件的方式实现实时的四路视频信息处理,避免了一般视频处理芯片进行大量实时视频信息处理时的性能瓶颈。
产品特性:
• 四个内置视频捕捉功能:同时处理各种不同的视频图像
• 三个输出显示功能和高速2D/3D渲染功能:支持多达五个显示输出
• 内置图像强化电路
富士通的汽车电子产品经理丁洁早在接受采访时表示,"富士通目前的客户都还在设计导入的过程中。2014年市场上大家会惊喜的看到大型的车厂推出基于富士通MB86R11系统的多款新车型面市。"谈到ADAS技术目前面临的技术挑战时,丁洁早说," ADAS目前面临的主要技术挑战是如何做到多种最新技术的更好集成和图像合成算法的创新,基于最新摄像头视频的技术、图形处理器的技术、最新传感器的技术和基于雷达的技术来提供一个更为安全、舒适,成本可接受的驾驶辅助系统。"另外,他对中国ADAS市场的前景也非常乐观,"ADAS技术在中国汽车市场,我们预计会先在可视停车辅助,360度三维立体全景辅助和驾驶盲区监控这三个应用方面得到最终消费者的欢迎。市场的爆发点可能在2015年前后,前装市场先行,后装市场也会有很大机会。"
5.瑞萨电子三大ADAS方案
俯视监控提供了汽车周围360度的视景,利用图像识别技术是其正逐步发展成为环绕检测系统。SH7766是一款图像识别SoC,搭载了SH-4A内核、失真校正引擎、图形、图像识别引擎以及其他环绕检测系统所需的硬件引擎。
单芯片实现汽车俯视系统,图像识别SoC SH7766
实现高性能3D图形引擎,支持逼真的3D图像 IMP-X2图像识别引擎 六个视频输入通道,包括了四个集成NTSC ADC的通道,从而降低了系统成本。
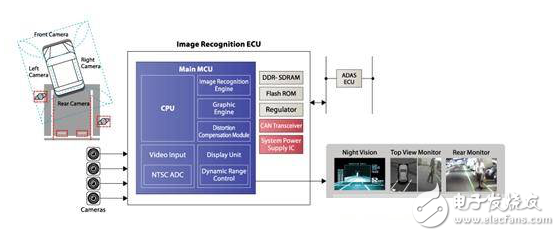
环绕检测系统/后方监视器系统框图
在车辆行驶过程中,这些系统使用摄像头或毫米波雷达探测白线、行人以及障碍物,从而为驾驶人员提供驾车辅助。瑞萨电子提供两套高级驾驶辅助系统(ADAS)产品及解决方案,
配备有大容量RAM的高性能RISC SH745x系列微控制器,以及配备有片上图像识别引擎的 SH776x图像识别SoC。
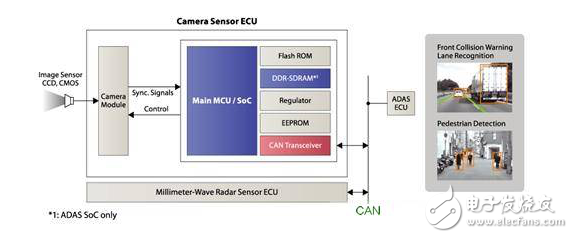
前方检测系统/视觉系统框图

传感器融合/ADAS控制ECU系统框图
6.NXP 360°全景泊车辅助解决方案
在车身前、后、左、右四个方向均安装广角摄像头,并将四个广角摄像头同一时刻采集到的多路
- 高级驾驶辅助系统的采用即将出现改变(05-04)
- 瑞萨电子3大ADAS检测系统解决方案简述(02-08)
- 飞思卡尔多摄像头全景泊车辅助系统与ADAS产品(02-08)
- 本土主动安全潜力无限,知名厂商汽车安全精华(03-01)
- 强化射频与MCU性能 车用77GHz雷达性价比攀升(03-03)
- 基于视觉的ADAS解决方案,近在咫尺!(05-07)