先进驾驶辅助系统方案设计与电路精华集锦
统。远程雷达系统一般安装在车辆前部,侦测正前方。这些系统的测距离超过100米,通常用于自适应巡航控制、刹车辅助和碰撞告警。
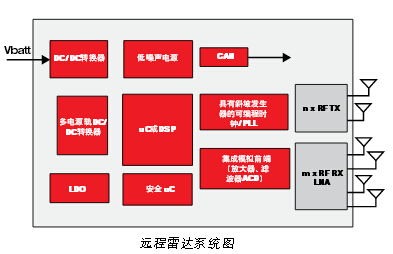
由于其较长的视线范围、较高的分辨率,以及识别和区分多种物体的能力,远程雷达系统要求DSP能够提供更多的处理能力,精确的信号调节,并且在很多情况下需要一个安全微控制器。随着诸如自适应巡航控制等应用开始接管车辆内的某些功能控制权(比如说加速器/刹车),它们就需要比盲点检测或侧面碰撞告警等单纯的告警功能更高的安全级别。
推动远程雷达系统开发的因素有:
• 减小系统尺寸
• 降低系统功率耗散(实现更小封装和更少的冷却要求)
• 低噪声性能组件和设计(针对高信号性能)
• 可实现更高分辨率和更佳物体检测/区分功能的天线设计
• 运行复杂软件算法的DSP在雷达能够影响车辆功能的系统中,安全性功能也很重要。
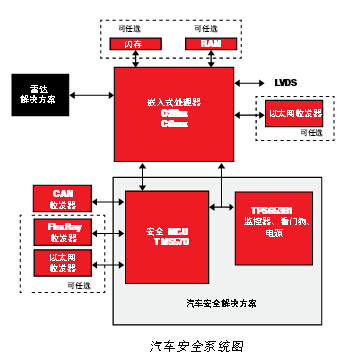
传感器融合
先进驾驶辅助系统(ADAS) 仍被视为单独的系统,彼此之间相互独立。每个系统有其自己的用途,或者显示信息,或者执行一项操作(比如说鸣响),而无需考虑任何其它ADAS系统。根据所采用的传感器技术类型的不同(雷达、摄像头、超声波、光照检测或测距),这样可实现特定的功能,但是却无法充分利用这个系统。为了制造完全自主的车辆,就需要将来自不同传感器的信息和数据组合在一起,充分利用它们的各自优势,并且弥补每个独立系统始终存在的不足。这被称为传感器融合。与多个、完全独立系统完全不同的是,不同的ADAS系统将它们的信息提供给一个中央传感器融合引擎控制单元(ECU),此单元能够将所有信息组合起来,使驾驶员能够更好地感知周遭环境。根据所选择的系统分区,原始数据(比如说未经压缩的视频)或预处理数据(例如来自雷达的目标数据)被提供给融合ECU。这对于融合ECU的处理能力需求,以及电源要求和与子系统(提供传感器数据的独立ADAS模块)连接的通信接口类型有巨大的影响。目前开发的大多数系统将集中和分散数据处理混合在一起。由于融合ECU对车辆和乘客安全的巨大影响,融合ECU应该通过ASIL认证。这不但会影响到ECU和系统设计,也会对IC选择造成影响。



- 高级驾驶辅助系统的采用即将出现改变(05-04)
- 瑞萨电子3大ADAS检测系统解决方案简述(02-08)
- 飞思卡尔多摄像头全景泊车辅助系统与ADAS产品(02-08)
- 本土主动安全潜力无限,知名厂商汽车安全精华(03-01)
- 强化射频与MCU性能 车用77GHz雷达性价比攀升(03-03)
- 基于视觉的ADAS解决方案,近在咫尺!(05-07)