可穿戴型下肢助力机器人感知系统研究
时间:06-25
来源:中电网
点击:
的载荷和敏感桥路之间的关系进行测量,其测量值(数字量)与所加砝码数值的对应关系如图8所示(XLable表示传感器标定所加载荷,Ylable表示传感器输出数字量)。
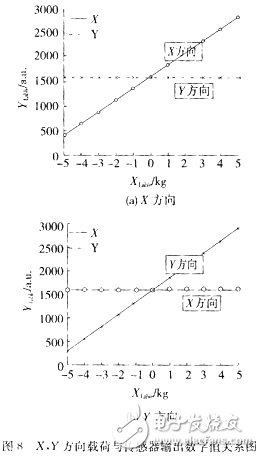
从图8可以看出,传感器X方向加力时,所受载荷和传感器敏感桥路输出之间的映射关系可以基本认为是线性的,Y方向的最大耦合不超过2.5%。利用最小二乘法得到传感器的两组静态标定矩阵为由此可以计算出传感器的I类误差为2%,II类误差为2.5%。利刚C1,C2两组标定矩阵对传感器进行实时测量检验,结果显示I类最大误差不超过2%,II类误差不超过2.5%。通过该标定系统得到的静态标定矩阵和理论设计值比较接近,说明标定系统和标定方案是切实可行的。
5 结 论
本文针对一种新型的人体辅助型康复机器人,设计了一套基于CAN总线的下肢运动信息感知系统,见图9。经分析可穿戴型助力机器人所需要的控制信息可确定传感器的种类、数量和安装位置;重点介绍腿部和脚底力传感器的弹性体设计,测量电路和上下位机软件;对传感器进行标定实验并对数据进行分析,给出传感器的一般性能指标,结果说明本研究中的设计理论和设计过程是正确的,基本可以满足可穿戴型下肢助力机器人控制系统的需要。未来的工作主要集中在以下几点:①继续完善传感器的弹性体结构,在满足传感器性能指标的基础上进一步减小传感器弹性体体积和精确确定应变计的贴片位置;②完善传感器的测量电路设计,增加滤波电路,改进放大电路;③改进传感器的标定系统,把标定误差降至最低。

- 谷歌眼镜初体验:眨眼拍照、WIFI接入、语音文本转换(03-24)
- 可穿戴设备新趋势:触摸即可发光的“电子皮肤”(06-24)
- 医疗可穿戴智能设备的主要器件:MEMS传感器(02-14)
- 应可穿戴保健设备大势 ADI最新解决方案详解(02-11)
- 可穿戴设备市场起飞,蓝牙Smart引爆设计热潮!(02-17)
- 三星最新曲面Gear Fit最详拆解:内部设计构造大揭秘(04-29)