可穿戴型下肢助力机器人感知系统研究
1 引言
可穿戴型下肢助力机器人是辅助型康复机器人的一种,是一种帮助人们扩展下肢运动能力的助力装置,其基本原理是在基于人体运动行为意识信息的基础上,由安装在腿部关节(髋关节及膝关节)处的伺服电机驱动关节运动,通过各关节角度、速度值的改变来达到与人体腿部的协调运动并提供助力,降低人在负重或长时间行走情况下的运动强度,对那些有异样运动行为的人提供治疗和矫形,与人体组成了一个协调而且完美的整体。
目前,世界上大约有10余家实验室从事可穿戴型人体助力机器人的研究,其中日本和美国走在前列,国内尚未见相关报道。日本筑波大学(Tsukuba University)在2002年研制开发了机器人装混合助力腿(hyhrid assis-tive limb,HAL),机械外骨骼绑缚在人腿的两侧,利用贴在腿部皮肤上的EMG传感器检测肌肉的电流,控制电动马达驱动机械外骨骼运动以辅助腿部的动作。美国加州大学伯克利分校机器人和人体工程实验室研制出美军"伯克利下肢外骨骼"(Berkeley lower extremity exoskeleton, BLE-EX),由背包式外架、金属腿及相应的液压驱动设备组成,机械系统采用了与类人形结构相似的设计,背包式外架能够使操纵者携带一定载荷,其有效作用力不经过穿戴者而直接经由外骨骼传至地面。下肢外骨骼能够携带外部负载和自身的重量(包括操纵者的重量)在崎岖路面远距离行走,能使带有全副武装的士兵增强负重能力和提高行军速度。然而上述装置存在着共同的缺点,由于肌电传感器是根据肌肉活动时皮肤表面传送的微弱电流信号或肌肉的软硬程度来推断人的行为意识,导致所采用的大部分传感器要与人体肌肤直接接触并粘贴在肌肤上,需要特别的固定装置,这样直接导致穿戴上的不便;人体分泌的汗液、传感器安装的好坏等将影响所获取信息的稳定与准确性,而且信息量大而复杂,易受干扰,从而使控制难度加大。因此,本文设计一种新型的可穿戴型下肢助力机器人感知系统,该系统用于获取人体下肢和机器人外骨骼之间的接触力,利用这些力信息和关节角度信息控制机器人外骨骼以实现对人体下肢运动的助力。
2 助力机器人系统
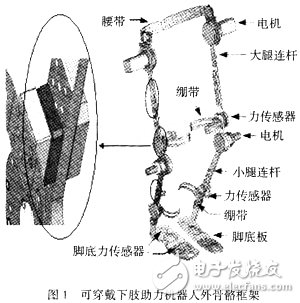
可穿戴型下肢助力机器人主要由机械、传感和控制三大部分组成。机器人外骨架包含12个自由度,每只腿有6个自由度,髋关节包含3个自由度,膝关节、踝关节和脚底各包含1个自由度,该设计要求不仅符合以往的拟人机器人行走机构的设计要求,又达到与人体腿部运动相协调、互不产生运动干涉的设计要求,如图 1所示。
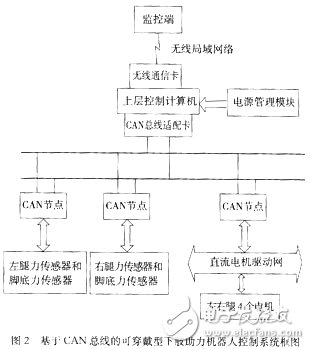
执行部分主要指直流伺服电机,该系统需要4个,它们分别固定在两腿髋关节和膝关节上。可穿戴型下肢助力机器人控制系统主要采用PC104嵌入式控制系统板和PC104CAN卡,整个系统的控制结构见图2。
3 机器人感知模块
3.1 人机系统接触信息
可穿戴型下肢助力机器人主要利用人体下肢运动信息提供助力,这些运动信息主要包括人体与外骨骼机器人的腿部接触力信号、脚底力信号,膝关节和踝关节的角度信号等。为了获取这些运动信息,设计一套基于CAN总线的多传感器感知系统,解决了传统的传感器通信方式(主要是指RS-232和RS-485)中主节点单一和实时性差等问题。该系统由电机码盘、安装在腿部的2个二维力传感器和安装在脚底的6个一维力传感器组成。腿部力传感器固定在人腿膝关节和踝关节上部,用于测量人体与外骨骼之间的接触力;脚底力传感器安装在脚尖和脚跟,用于测量地面反力;电机码盘用于测量髋关节和膝关节转动角度,如图1所示。
3.2 系统设计
腿部二维力传感器是用于测量机器人外骨骼和人体之间的接触力大小的传感器,其测量的准确性和稳定性对助力机器人的控制有重要的意义。腿部力传感器主要是由2个二维力传感器组成,用于测量人体大、小腿与机器人外骨骼之间的接触力,该接触力包括沿人体腿部的力(X方向)和垂直腿部的力(Y方向)。在下肢助力机器人的控制中,除了要知道人体腿部与机器人的作用力之外,还需要知道人体脚底对机器人的作用力,而脚部力传感器是测量地面对人机系统的作用反力。人体落脚对地面的着力点可以用三个支撑点表示,这三个支撑点的位置分别位于第一跖骨根部和第五跖骨根部以及后脚跟,人体靠这三点间产生的足弓支撑身体,而身体的重量经由这三点传递到地面。为了准确获取行走时脚底的力信息,脚底力传感器的安装位置就定在这三点的位置上,每只脚需要安装3个一维力传感器,共需要 6个一维力传感器,具体安装位置见图3。由于脚底机械部分的限制
- 谷歌眼镜初体验:眨眼拍照、WIFI接入、语音文本转换(03-24)
- 可穿戴设备新趋势:触摸即可发光的“电子皮肤”(06-24)
- 医疗可穿戴智能设备的主要器件:MEMS传感器(02-14)
- 应可穿戴保健设备大势 ADI最新解决方案详解(02-11)
- 可穿戴设备市场起飞,蓝牙Smart引爆设计热潮!(02-17)
- 三星最新曲面Gear Fit最详拆解:内部设计构造大揭秘(04-29)