可穿戴型下肢助力机器人感知系统研究
,传感器弹性体体积比较小,其本体机械尺寸φ40 mm(直径)×8 mm(厚度),量程为1000 N。
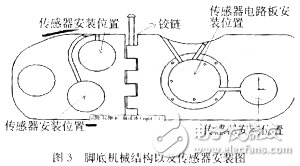
3.3 传感器设计
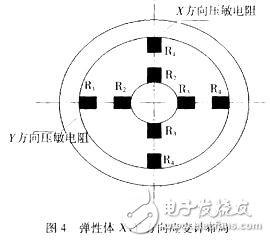
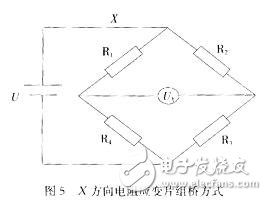
弹性体的设计是多维传感器设计中的关键。本文在利用有限元分析方法对传感器弹性体的静态和动态特性仿真分析的基础上,设计一种基于E型膜片的弹性体结构,这种结构的传感器具有结构简单、灵敏度高、维间耦合小、容易标定的特点。整个弹性体主要由弹性膜片、应变计和受力转接体三个部分组成,弹性体由两层 E型膜片构成,实现X和Y两个方向应变力的测量。弹性膜片为圆形结构,其直径和厚度分别为φ15 mm和2 mm,厚度方向和测量方向一致。敏感元件采用箔式电阻应变片,应变片粘贴在E型膜片上。传感器的输出是E型膜片的应力,应力的测量方式很多,本研究采用箔式电阻应变片,应变片粘贴在E型膜片上,用于测量弹性体上应力的大小。应变计贴片位置如图4所示,X和Y方向应变片安装在E型膜片的下端,四片应变片电阻组成一个惠斯登全桥电路(如图5所示),实现输出信号的自动解耦。当力作用于传感器时,由于力大小、方向的不同,各个方向的敏感电阻受到的应力不同,从而得到力与应变之间的关系。以X方向为例,E型膜片敏感弹性部分的圆环平膜片属于薄板结构,在X向力的作用下,边界条件比较简单,可以等效为外圆周固定,集中应力作用在硬中心的圆形薄板。根据薄板理论可知,周边固支具有硬中心的膜片在半径r处的径向应力εr和切向应力εθ为

式中:ω,h分别为圆形膜片的法向位移和厚度;F为施加力的等效集中力;f(r),P(r)是仅与r有关的函数。
由上式可以看出,当半径r一定,也就是压敏电阻位置固定时,圆形膜片表面上的应变ε为
ε=kFF (3)
式中kF为应变系数常量。
由于使用等臂电桥,即R1=R2=R3=R4,有

式中:ε1,ε2,ε3,ε4分别是4个敏感电阻R1,R2,R3,R4的应变;ε为圆形膜片的总应变;G,k为常量;UX是桥路输出电压。
综合式(4),(5),桥路的输出电压信号正比于传感器的力信号,测量输出电压信号就可以得到被测目标的力信号。
传感器硬件电路采用嵌入式片上系统,由数字电路和模拟电路两部分组成,其中模拟电路由信号调零电路、运算放大电路和模拟滤波电路组成;数字电路部分主要包括A/D采样模块、数字计算模块、CAN总线控制器、CAN总线驱动器和必要的外围电路模块。图6是助力机器人力传知系统的数据采集与处理系统的硬件电路原理框图。

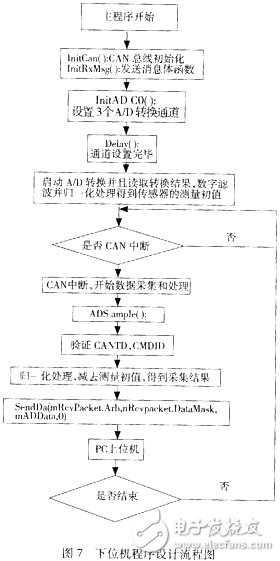
软件设计分为下位机(微处理器)的软件设计和上位机(PC)的软件设计。每个传感器作为一个节点通过CAN总线互联,当接收到上位机的命令后,首先进行命令判断,根据不同的命令作出相应的数据处理。上位机(PC)主要包括清零点、力信息(数字量)、回传力信息、查询力信息、屏蔽报警等命令。下位机的软件设计主要由数据采集程序(A/D转换)、数据处理程序以及CAN总线通讯程序三大部分组成。启动CAN中断以前,在主程序中进行一次数据采集,得到传感器系统的初始值,这其中包括3个A/D转换通道;延时,完成通道的初始化;数据采集是在CAN中断程序中完成的,每一次中断完成1组三维力信息数据的采集以及相应的A/D转换;同时读取转换结果,对转换结果进行数字处理,数字处理主要由数字滤波与力信息解耦两大部分组成,数字滤波主要采用窗口移动法与数据平均值法相结合;数据经过解耦处理后,通过SendData()函数,将数据发送到CAN总线上,上位机通过ID号识别接受下位机数据,具体流程见图 7。
4 传感器标定实验
E型膜片元件结构的复杂性使得产品特性的一致性比一维传感器更难保证,应变计的贴片工艺很难保证绝对理想情况,这些因素决定传感器的实际静态特性和理论计算值之间存在一定的误差,因此传感器的静态特性一般采用标定实验的方法获取,其标定准确度将直接影响传感器使用时的测量准确度。所谓传感器的标定,就是建立传感器的三路输出值与作用在传感器坐标系原点上的三维力之间的数量关系。标定实验过程包括静态标定和实时测量验证两部分。为了减少随机误差的影响,采用一种具有一定冗余力向量的最小二乘标定方法。设F是加载力矩阵,V为传感器的输出矩阵(数字量),C为标定矩阵,E为误差矩阵,则
F=CV+E (6)
式中:F,V为已知量;E可以设定。于是,标定矩阵的求解可以转化为求解标定矩阵C,使式(6)在最小二乘法意义下最优。在微型指力传感器标定过程中,对施加在传感器上X,Y方向
- 谷歌眼镜初体验:眨眼拍照、WIFI接入、语音文本转换(03-24)
- 可穿戴设备新趋势:触摸即可发光的“电子皮肤”(06-24)
- 医疗可穿戴智能设备的主要器件:MEMS传感器(02-14)
- 应可穿戴保健设备大势 ADI最新解决方案详解(02-11)
- 可穿戴设备市场起飞,蓝牙Smart引爆设计热潮!(02-17)
- 三星最新曲面Gear Fit最详拆解:内部设计构造大揭秘(04-29)