智能泊车管理导航系统的设计案例
效期等相关信息,若系统不予入场或出场,则显示相关原因,明了直观。在空闲时显示时间日期、欢迎用语、或其他系统相关提示信息。

特点:
1) 采用室外超高亮LED发光管,白天仍然能显示明亮;
2) 采用超载规模集成电路和高性能单片机,系统稳定,升级方便;
3) 中英文滚动显示,内容丰富,人性化的问候;
4) 防雨防水式设计,确保全天候可靠运行;
5) 外观设计新颖,系统分级运行且不影响系统整体性能;
6) 可以根据客户需要,任意更改显示内容;
7) 语音提示:和电子显示屏功能相匹配,以语音的形式同步进行提示,指导用户科学使用停车场。向车主报告停车时间、缴费金额及人性化温暖的语言提示(如"欢迎光临"、"一路顺风")等,提高系统收缴费透明度。
3.2 自动道闸

1) 具有双向自锁功能 电动栏杆在开、关到位时,外力不能使电动栏杆上升、下降。
2) 具有时间保护功能 当限位开关失效时,(线路断或磁敏开关损坏),通过精确设定的运行时间,使栏杆正好运行到终点时停止。
3) 具有软启动功能及过流、过热保护 有效保护电动栏杆的核心部位电机的正常运转。
4) 多种控制方式 手动控制、按钮控制、遥控制台和电脑控制等操作方式。
其主要组成部分:
机箱:结构坚实牢固,做防雨水和喷塑保护,外壳可以用特制的钥匙方便地打开和拆下。
挡车闸杆:采用铝合金材料的方通杆,杆体内加了整条的加强筋,质量可靠。在栏杆大于4米时和风力较大时,栏杆有断裂的可能性。
电动机:电机和减速机构一体化设计,结构紧凑、免皮带传动,免维护,终身保修。
传动部分:四连杆平衡设计,确保栏杆运行轻快、平稳、输入功率小,防止人为抬杆和压杆,将外部作用力通过传动机构巧妙御载到机箱上。
电子控制部分:感应接近开关、机械行程开关,结构缓冲顶位三重控制。由主控制器(控制盒)、集成在减速机上的限位开关、遥控器等组成,并具有可以连接三联按钮或其他控制设备实行开、停、关控制的远程控制接口。
德富威电动栏杆的品种及规格齐全,能满足各种环境与场合的需要,其种类按车流量分标准型和快速型;按方向又有左右之分;按栏杆形状分有直杆型、曲杆型、折叠杆型和栅栏型。同时用户还可选配遥控装置、红外线检测保护装置或地感检测保护装置、RFID卡智能停车场管理系统等配置
3.3 导航信息屏
中英文LED显示智能导航,安装在个入口,拐角出,以文字和图片形式显示停车的时间,车位使用情况,并推荐车站停车车位和轨迹路线。
3.4 车位侦测器
红外感应侦测器安装在各个车位下方,实时侦测车位控制情况。
3.5 数据传输基站
场地覆盖Wi-Fi AP读写器,采用IEEE 802.11 技术,负责数据交换和信息回传。
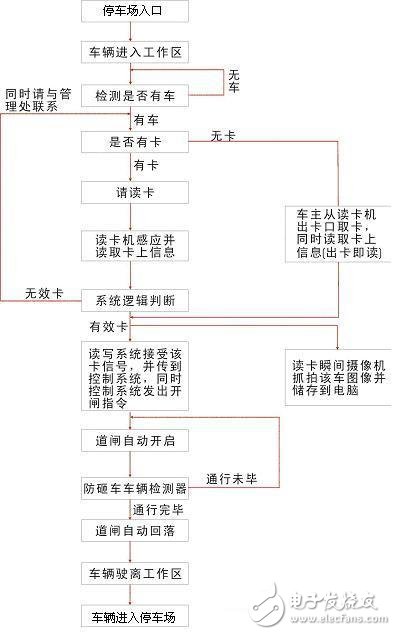
4.系统工作流程
4.1 智能停车进出流程图

4.2 智能停车逻辑判断图
4.3 车辆进出流程
入场车辆行驶至读卡区,系统自动检测是否有车,如有车,车主将卡片在读卡范围内轻轻一晃,系统即可感应卡片上的信息,并传输至控制系统,经系统逻辑判断正确后(如卡片过期或被损坏等则读卡无反应,且发出"此卡非法"等语音提示),读写系统向卡上写入信息,并传送至管理主机上储存(在读卡瞬间系统抓拍该进场车辆图像,同时传送到电脑上保存)。系统同时发出"欢迎入场、此卡有效期多久"等语音温馨提示,中文电子显示屏则显示相应中文字幕。单片机发出开闸指令,道闸自动开启,车辆进入车场,防砸车检测器检测车辆通过,道闸自动回落。
出场车辆行驶至工作区,系统自动检测是否有车,如有车,车主只需将卡片在读卡范围内轻轻一晃,系统即可感应卡片上的信息,并传输至控制系统,经系统逻辑判断正确后(如卡片过期或被损坏等则读卡无反应,且发出"此卡非法"等语音提示),系统向卡片上写入信息并传送至管理主机上储存(在读卡瞬间系统抓拍该出场车辆图像,同时传送到电脑上保存)。同时系统调出该卡入场时所抓拍的图像,由值班人员根据两幅图像进行对比(如:车牌号码、车型等),如一致无误码,人工按回车键开闸(自动对比系统则由电脑自动对比图像及号码,如一致自动开闸放行)。读卡机发出"一路顺风、此卡有效期多久"等温馨提示,中文电子显示屏则显示相应中文字幕。道闸自动开启,车辆进入车场,防砸车检测器检测车辆通过,道闸自动回落。
4.4 临时车辆进出流程
入场临时车辆行驶至工作区,由值班人员预制车牌(输入该车车牌号码、车型等)并电脑发卡或由车主自行在读卡机上的按取卡按钮取卡,系统读取卡上信息,经逻辑判断正确后
泊车系统 WIFI 自动识别 智能导航 RFID 相关文章:
- 3G与wifi监控的对比(09-07)
- 牛人造大型无人巡逻车详细讲解(10-29)
- iPad2操控Wifi精确遥控飞行器(10-30)
- 3G/WIFI控制太阳能驱动机器人制作详解(10-28)
- 人性化的低功耗WIFI智能温控器应用方案(08-17)
- 基于无线移动技术的移动医疗应用(09-24)