新型电动汽车锂电池管理系统的研究与实现----系统的总体设计
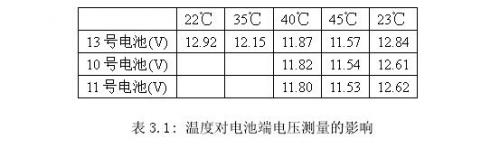
从上表的数据中可得出:当电池端电压处于工作常用电压范围时,以环境温度22℃为基准,环境温度每上升一度,测量值受温度的影响约为-0.06伏,温度对测量的影响是很大的。
为了减少温度对端电压测量的影响,可采取以下两种方法:
方法一:温度补偿。具体方法为:将测量板上所有光耦表面粘上同一根导热性好的金属条,目的是为了各个光耦上的温度一致,再测量这根金属条上的温度,把这个温度作为温度补偿用的环境温度。单片机在计算端电压时将这个温度与基准温度的差乘上一个补偿系数作为补偿电压。但这要求温度测量准确,何况不同光藕的温度系数也不同。
方法二:总电压校正。由于总电压是各单电池端电压之和,这样就可以通过测量总电压与单电池端电压总和之差,将这个差值分摊在每个电池的端电压上,从而达到提高单电池端电压绝对精度的目的。但这也有一个缺点:单电池测量电压偏差大的电池经总电压校正后,偏差将更大。
总之,用以前测量单电池电压的方法难以取得高的精度,并且调试难度很大,因为不同批出厂的光藕的特性都不一样。新系统设计时,针对锂电池,设计了全新的电路,测量性能大大提高。
3.3.2用移位电路实现单电池电压测量
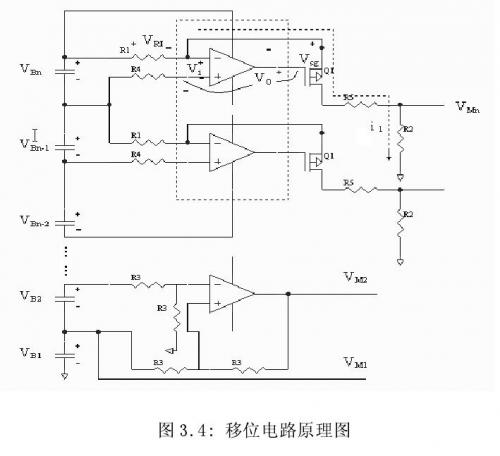
针对锂离子电池最大电压低于4.2V的特点,我们设计了下面移位电路图3.4用于单电池电压测量,此电路用低成本运放LM258和场效应管BSS84及一些辅助元件组成,在很宽的温度范围内有恒定的增益。
此电路专为锂离子电池设计,对其他电池通过适当修改电路参数来完成,下面是它的工作原理:设电池组最后一节电池为B1,最上一节Bn,它们之间串连相接,系统中从B3到Bn测量用移位电路,B2的测量用一个减法器来完成,B1直接送到A/D.现在来分析Bn节电池的测量,工作时,Vo↑→Vsg↓→i1↓→VRI↓→V1↑→Vo↓。平衡时,i1稳定在一个值使得:
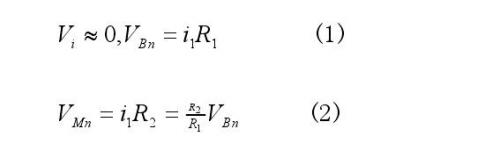
在单片机的软件设计上,有一个校准程序来减少初始误差,校准期间,用一个校准电压源代替电池,设此时的测量结果为EMn,可求得一校准系数

移位电路误差分析:
虽然校准程序能减少因R2/R1带来的误差,但它不能减少温漂带来的误差,设电阻的温度系数是±100ppm,如果温差ΔT=50℃,阻值将相差±0.5%.设计时如果R1和R2封装在同一个阻排内,则温度对R2/R1的影响可忽略。
其他的误差来源于运放,如输入漂移电压(Vos)、输入漂移电流(Ios)及他们的温漂。在下面的误差分析中,n可以是移位电路中的任何一节电池,且只考虑Vos带来的误差,对Ios的分析同样。
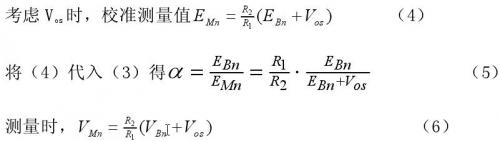
单片机用系数α校正测量结果得

测量误差ΔV为:

LM258的最大Vos为±5mV,而校准电压EBn约为4V,Vos远小于EBn,故
EBn与VBn的差值越大,误差就越大,最大误差发生在VBn = 1/2*EBn时,此时V=0.5* Vos =±2.5mV,实际上,如果电池电压低于2V,锂离子电池已有故障应当更换,此时的测量精度已不重要。
由运放Ios引起的误差分析同Vos,它的最大误差为±2mV.总之,运放引进的误差总共为±4.5mV.
- 电动汽车:颠覆性的快速充电与非接触充电技术(09-20)
- 电动汽车的基本概述及重要组成(10-28)
- 矢量控制变频器在混合动力电动汽车中的应用(01-27)
- 基于CAN总线的电动汽车控制系统设计(05-25)
- 电动汽车驱动系统中的超级电容原理(05-21)
- 动力电池管理系统硬件设计技术(05-30)