汽车电子液压制动系统跟随特性的实验研究 ----EHB系统跟随特性的实验研究(二)
4.3基于PID的EHB制动压力跟随控制算法实验验证
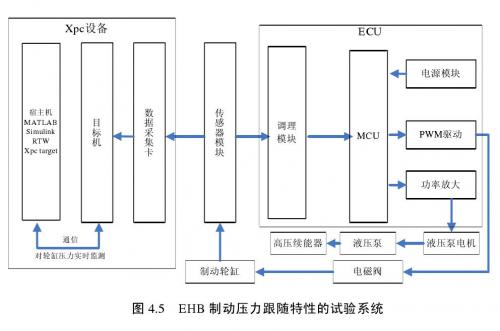
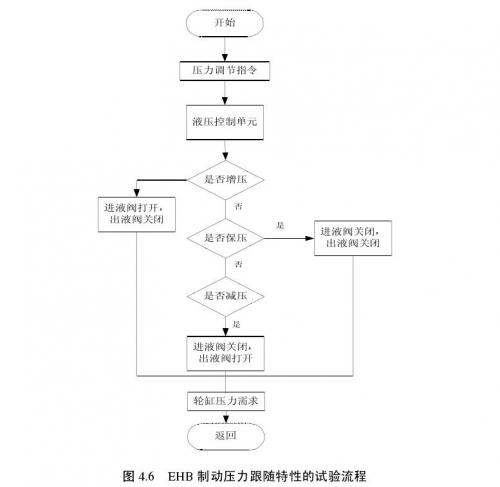
EHB系统制动压力跟随特性的实验系统如图4.4所示主要可分为两步,首先将编译好的控制程序下载到MCU中,MCU发出压力控制指令,经驱动电路将控制信号输出给液压控制单元,通过控制高速开关阀的开关,最终实现增压、保压和减压三种工作状态及相互之间的转换。其控制流程如图4.5所示
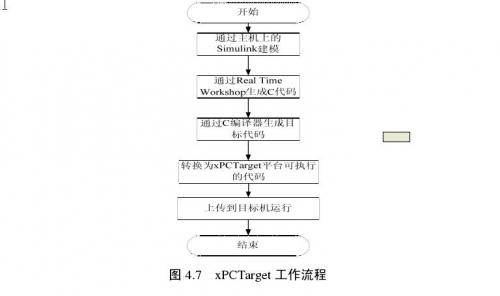
然后应用xPC数据采集设备,对目标压力与实际压力进行观测。xPCTarget数据采集过程是通过目标实时内核来实现的。一方面目标机用自己的RAM将应用程序的实时信号数据存储,另一方面将采集到的信号进行可视化显示在屏幕上,同时还可实时地将采集到的信号传到主机上分析并进行可视化。图4.6为xPC数据采集设备的工作流程,主要步骤如下:
(1)启动xPC Target平台的宿主机和目标机。在宿主机中运行MATLAB R2006b,建立Simulink仿真模型。在Simulink模块库中将输入信号模块、输出等模块、目标示波器等数据采集所需模块添加到Simulink框图中,然胡进行参数设置。通过Simulink模块对参数对话框进行定义及物理I/O板相对应的参数值(如输入输出信号的通道数目、编号、输入输出电压的范围和采样时间等)进行定义。
(2)在使用工具条中的选择RTW/Build命令(Ctrl+B),自动完成程序代码的生成、编译、链接和下载。对模型进行编译并下载到目标机中,待完成后选择仿真外部模式连接到目标机。
(3)运用xPCTarget的信号采集方式同目标应用程序进行交互式操作,如调整参数、实时的采集和跟踪信号、显示和控制目标系统的状态等。
试验中如需要实时接收电磁阀控制板送来的4路轮缸压力信号,需在MATLAB命令窗口中运行xpcexplr命令打开xPC Target Explorer.连接目标后,在Host Scope中添加示波器,并将需要观测的信号添加到示波器中,即可在试验过程中观测变量。试验结束后,可采用getxpcFileData()函数(变量为'EHB制动压力跟随文件名')从目标机上载试验结果,用于分析EHB综合测试的性能。
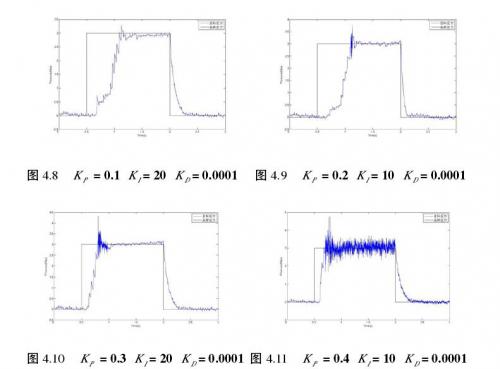
在进行压力跟随实验的时候我们要对PID控制器参数进行整定,应用xPCTarge t数据采集实验平台观测所得目标压力与实际压力之间的关系,以此找出PID控制器的最佳参数,一般来讲,PID参数的确定主要是根据试凑和调试经验来确定的。首先要了解各个参数对系统的影响,以纯比例控制器(即KI = KD=0)来控制系统,大致确定Kp的范围,然后在将其他两个参数加到控制器中,反复运行调试系统最终确定最优参数。当系统超调量较大时,应将比例环节Kp减小,同时增大积分环节KI和微分环节KD;当系统响应慢时,应适当增大比例环节Kp,减小积分环节KI和微分环节KD;当系统稳态误差超过允许范围时,应增大积分环节KI和微分环节KD;当系统振荡严重时应增大比例环节Kp,同时减小积分环节I K和微分环节KD.经过调节确定最佳比例环节的范围大致在0.1~0.3之间;最佳积分环节的范围大致在20~30之间;最佳微分环节的范围大致在0.0001~0.001之间。以左前轮缸为例,图4.7~4.10为目标压力在3Mpa不同PID控制参数下轮缸压力跟随的响应情况:
PWM调制信号的频率f = 25HZ,轮缸目标制动压力为9Mpa时的轮缸实际制动压力阶跃响应曲线如图4.11所示。此时PID控制器的参数为:
Kp = 0.3
KI = 20
KD=0.0001
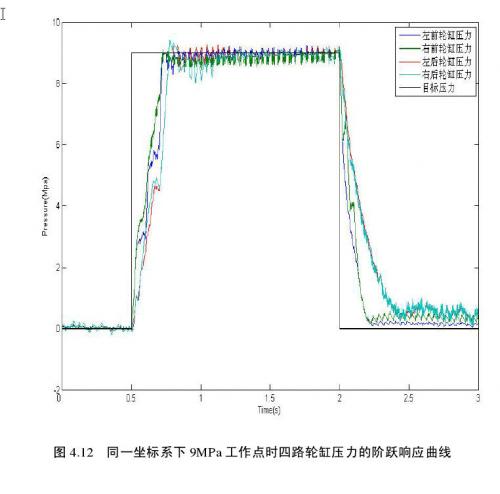
从图可以看出通过PID控制策略控制进液阀、出液阀的PWM调制信号的占空比,有效地控制轮缸流量,达到精确控制轮缸压力效果。如图4.12所示同一坐标系下9Mpa工作点时四路轮缸压力的阶跃响应曲线,我们可以看到,系统响应时间小于0.2s,稳态误差最大不超过0.7,实际轮缸压力对目标轮缸压力跟随稳定快速,满足系统的要求。
4.4关于实验影响因素的分析
本方法适用于一类系统,该类系统的特征是由于某些物理器件结构上的限制,或者甚至扰动的不同从而导致当工作点不同的时候,系统的传递函数发生变化,进而使得系统的动态响应不能用相同的模型来表达出来,因此不仅控制器的参数要相应的发生变化,而且可能控制器在某些时候其结构都需要做相应的调整和改变。
对于本EHB系统来说就属于这类系统。本EHB系统中包含有很多可能导致这种情况的物理器件,具体分析如下:
(1)液压供给单元中的高压蓄能器的影响
由于本系统选择气囊式高压蓄能器来存贮能量,该蓄能器在工作过程中如同一个弹性元件,不停的减弱冲击和波动的影响。当在蓄能器临界工作点压力的时候,气囊在提升阀的作用下发生变化,此时的压力可能产生跳跃性的变化,而此时如果控制器的参数甚至结构不能做出相应的调整的时候,EHB系统的轮缸
汽车电子液压制动系统 EHB PID控制器 相关文章: