基于TMS320F2812的快速货车电子防滑器设计
防滑控制是保障铁道车辆制动安全,提高制动效率的有效手段。特别是随着货运速度的提高,一旦发生滑行,可能造成更大的危害,因此,我国的快速货车上应考虑安装防滑装置[1]。齐车装备有限公司和眉山车辆有限公司在研发的快速货车的样机上,安装了机械式防滑器来解决轮对滑行问题。然而机械式防滑器存在灵敏度低、性能不稳定、不能实时监测粘着状态、调节制动压力的缺点[1],且机械式防滑器中关键的敏感元件经长期使用易磨损,导致其性能逐渐下降。电子防滑器利用计算机控制技术,实时检测车轴滑行状态,调整制动缸压力以防止车轴打滑,且能根据多滑移判据判断车轴是否滑行,具有更高的准确性,在铁道客车、动车组等机车车辆上得到广泛运用。
在快速货车上使用电子防滑器需解决电源问题。西南交通大学已设计出一种可悬挂于车体底部的风力供电装置[2]。本文在此基础上对货车采用电子防滑器方案进行相应研究,提出了一种基于数字信号处理器(DSP-TMS320F2812)控制的防滑控制器,以模糊控制为算法,实现车轴的滑行检测和防滑控制。
1 快速货车电子防滑器原理
由于受粘着限制,车辆制动过程中容易产生滑行,甚至车轮擦伤。目前在我国速度超过120 km/h的铁道机车车辆上均安装了电子防滑器,防止车轴滑行。从原理上,快速货车电子防滑器和客车电子防滑器其原理是一致的:防滑器通过实时采集车辆上4个车轴速度,经比较得到车辆基准速度,进而计算车辆滑移率和减速度等,并根据多滑移判据,判断车轴是否打滑,从而调整制动缸压力,防止车轮滑行。本文设计的电子防滑器原理如图1所示。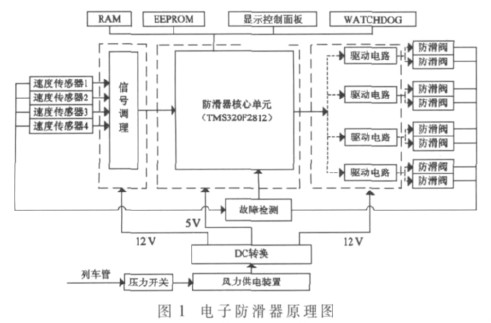
2 硬件设计
防滑器需要采集各车轴速信号。速度传感器输出信号一般是速度脉冲形式,同时经过相应的数据处理才能完成防滑控制。较高的运算速度和数据处理能力可缩短防滑器的响应时间,提高响应准确性。本文选用了TI公司的32 bit定点DSP-TMS320F2812作为防滑器主机的核心控制器,其事件管理器的捕获单元可捕捉到外部引脚的跳变,可方便用于速度传感器信号的测量。该芯片数据处理能力达150 MIPS,集成了丰富的片上外设,既有数字信号的处理能力,又有强大的事件管理能力和嵌入式控制能力,特别适合于需要大批量数据处理的测控论域[3]。此外,完成防滑控制主要用到的模块还包括:事件管理器(EV)的定时器单元和CPU定时器、外设中断扩展模块(PIE)、模数转换模块、SPI通信接口、看门狗、通用I/O、外部中断接口和存储器接口等。
为了减少系统输入、输出与核心控制单元之间的信号干扰且便于维护,防滑器硬件采用如图1所示的模块化设计,分为信号调理模块、核心控制单元和驱动模块。
核心控制单元包含了最小系统,其包括TMS320F2812、时钟与复位电路、电源和滤波、JTAG等。此外,电子防滑器还应包含其他必要的应用电路,如故障码掉电存储、显示和清除等。本文将DSP的串行外设接口(SPI)扩展了EEPROM存储,选用X5045作为故障码存储器,其存储容量为4 KB,可进行100万次擦写。为方便维护,本文设计了故障码显示功能,选用MAX7219作为两位数码管的显示驱动器,由DSP的I/O口控制。此外,利用TMS320F2812的3个外部中断口,直接作为按键控制接口,用于控制故障码的显示和清除等操作。
信号调理模块和驱动模块是电子防滑器的重要组成部分。速度传感器的信号经信号调理(光耦隔离)接到DSP的4路捕获口,由DSP实时采集各车轴速度,计算滑移率、减速度等。防滑器根据车轴运行情况控制电磁阀驱动电路,从而控制防滑阀充放气、调节制动压力。
3 软件设计
在明确电子防滑器功能的基础上,系统采用了模块化编程的思想,程序总体框图如图2所示。由于TMS320F2812的PIE模块最多可支持96个中断,为系统的模块化编程带来了很大的方便,增强了系统程序的可读性。其中速度处理和滑行检测控制是实现系统功能的关键模块。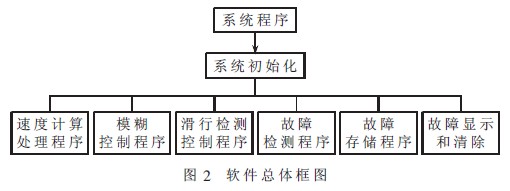
3.1 滑移率及减速度的计算
车轴前行速度v和车轴传感器发出的脉冲频率f成正比关系:
式中,D 为车轮直径,Z 为车轮每转发出的脉冲数。只要测得速度传感器脉冲频率即可计算各车轴速度。由于车辆制动过程速度传感器频率变化范围广,为保证在高、低频情况下都能获得较高的测量精度,本文选用变周期的M/T法测速,如图3 所示。频率测量的最大误差为一个基准脉冲信号,其中基准脉冲的频率(37.5 MHz)等于系统时钟频率除以分频系数。所以只要测得速度脉冲对应的基准脉冲个数即可计算速度脉冲的频率。捕获CAP1,2 脚时基为定时器1, 设定计数周期为1 ms; 捕获CAP5,6 脚时基为定时器3,计数周期为1 ms。开启定时器周期中断和捕获中断,N 个速度脉冲对应的基准脉冲个数:
速度测量的精度直接影响到控制结果, 因此防滑器对速度的测量有较高的要求。本文用函数信号发生器生成脉冲信号, 模拟速度传感器速度输出, 用电子防滑器测量其频率, 以检验电子防滑器的速度测量精度。表1
给出了实验结果。其中,fosc为函数信号发生器(DF1405)产生信号的频率,vosc为车轴每转发出200 个脉冲情况下对应的速度,fDSP为防滑器测得频率,vDSP为其对应的速度值。结果表明无论在高速或低速情况下,电子防滑器的速度测量绝对误差不超过0.05 km/h,相对误差不超过0.05%,可满足防滑器对速度测量精度的要求。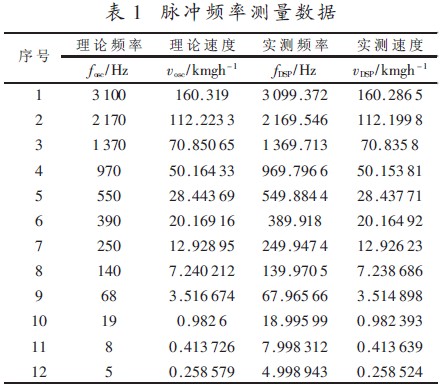
3.2 滑行检测和控制
本文应用模糊控制算法实现防滑控制。为提高DSP运算效率、缩短系统响应时间,系统采用了离线查询的方法实现模糊控制;通过MATLAB/Simulink仿真设计了二维模糊控制器;滑移率的基本论域为[0,0.25],减速度基本论域为[-4,4]。实际控制过程中只要测得滑移率和减速度的量化值,通过查表的方法即可得到当前控制量。电子防滑器的控制输出量为充放气时间(0~500 ms),正值即为充气,负值为放弃,0为保压。
设定CPU定时器0周期中断为5 ms(即单次充放气时间为5 ms),设定CPU定时器2中断周期为100 ms[4](即滑行状态检测周期)。则实际控制中,模糊控制量OP在[-50,50]内即实施保压。
- 另类传感器观念:汽车传感器(11-30)
- 汽车内部噪声智能控制系统的设计(11-28)
- 电源分配结构的三大转变为电源管理技术开创新局面(01-10)
- 基于MCU和DSP的步进电机控制技术(01-10)
- 采用DSP免提开发平台的车载信号处理与音频系统(01-24)
- 基于DSP的免持车载系统开辟新天地(02-20)