基于CPLD/DSP的赛车全电防滑刹车控制器设计
3 控制器软件设计
本赛车刹车控制器的软件以C语言为主体,适当的采用汇编语言,这样的软件编写给整个系统软件带来了方便。C语言使DSP程序的开发速度加快,而且可读性和可移植性也大大增加,在TI公司的C2000 Code Composer Studio(CCS)集成开发环境下进行程序调试。由于篇幅限制,此处仅介绍系统程序初始化以及主程序流程。
1、系统程序初始化。系统的程序在运行前,必须对DSP的时钟源、定时器、看门狗、AD模块、I/O口、捕获单元、中断等等进行初始化设置,使系统的内部资源、外围设备和硬件电路相匹配。系统在运行前,必须关掉所有的中断,以防止程序运行时产生不必要的中断或者程序跑飞等现象。因此在初始化后,系统才启动中断,使程序正常运行。
2、系统主程序流程。赛车全电刹车系统的主程序包括程序初始化模块、定时器中断服务、模拟量定时采样模块、速度信号的捕获模块、滑移率控制模块、压力调节模块、电流调节模块等等。其中,定时器中断服务程序给电流、压力、滑移率模块提供固定的时钟触发,以此时间作为各个模块的调节基准。当程序运行时,首先关断系统的总中断,完成初始化,接收到刹车命令后,开启总中断,进入程序调节的死循环,直到程序运行结束。电流环调节的时间最短,反映最快,其调节时间长短与电流信号滤波参数、DSP采样速度、CPU时钟周期、软件滤波程序等都有关系,一般时间为零点几个毫秒。而压力调节环的时间设定为电流调节环的N倍,电流调节环和压力调节环的调节次数可以现场测定调节时间而确定,滑移率调节时间更长。系统的主程序流程图如图3所示。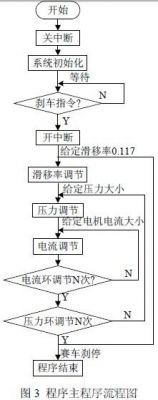
4 系统模糊控制策略
模糊控制器是模糊控制在控制系统中应用的关键部分,其主要过程为将取到的系统控制回路中被控过程输出的精确量进行模糊化,并且作为模糊控制器的输入。模糊控制器的输入和输出都是实际的精确量。然后进行模糊推理,在内部建立语言型的模糊控制规则,由输入条件判断模糊输出。最后将模糊量转化为实际的精确量,即去模糊化。模糊控制器设计的具体过程如下图4所示。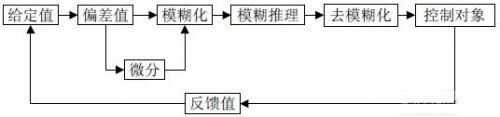
图4 模糊控制器原理图
本文作者创新点
本文主要完成了赛车刹车控制系统的设计,主要是硬件设计、软件设计和控制策略研究。硬件设计方面采用高速的DSP芯片和CPLD并设计其外围的电路。系统还设计了以IR2130为核心的驱动电路,电流信号硬件放大电路、滤波电路和保护电路,压力信号的放大电路和滤波电路,赛车速度和机轮速度的处理电路等等。控制策略方面采用模糊控制调节PID参数。
- 基于DSP芯片和CPLD的刹车控制系统设计(01-04)
- 制动能量回收中的电机情况(05-21)
- ispMACH4000Z CPLD在消费类电子产品中的应用(01-24)
- 如何利用可编程器件设计车用显示系统(08-30)
- 汽车运行状况图像监测系统的设计(09-29)
- 激光扫描车身坐标测量数据采集系统的设计(09-19)