基于CAN/LIN总线的汽车通信网络设计与实现
温度的参数允许响应时间为20s ,冷却温度的参数允许响应时间1min ,燃油温度的参数允许响应时间约10min ( 上述3 个信号每隔100ms 或1min 采样一次就完全足够了) ,前后车灯开关、座椅调节、车门开闭的传输延迟为10~100ms ,如将这些较为简单的ECU 节点挂在L IN 总线上,则既实现了网络分级控制,同时也降低了车辆电子系统的开发、生产和服务的成本。
如图2 所示,文中将数据传输速率较高的CAN 总线(1Mbps) 用于B、C 类网络,其控制对象为:发动机控制器、自动变速器、驱动防滑系统、牵引力控制系统、ABS/ ASR、安全气囊控制器及组合仪表信号的采集系统等。L IN 总线用于A 类系统,最高传输速率可达20kbps.其控制对象主要为:前后车灯控制开关、电动座椅开关、中央门锁与防盗控制开关、后视镜、空调、车窗控制开关等。这些控制对象对信息传输的实时性要求不高,但数量较多。采用L IN 总线可提高抗干扰能力、增加总线传输距离、降低成本。以门窗控制为例,在车门上有门锁、车窗玻璃开关、车窗升降电机、操作按钮等,只需一个L IN 网络就可以实现。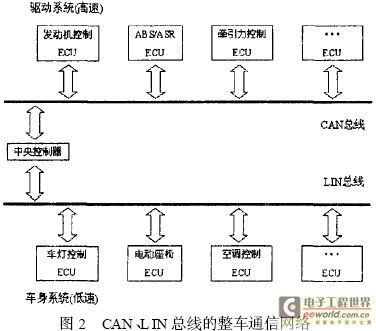
CAN 总线和L IN 总线相互独立,通过中央控制器实现资源共享并进行数据交换。中央控制器是整车管理系统的核心,它同时也是CAN 总线和L IN 总线的网关服务器,它的主要功能就是对各种信息进行分析处理并发出指令,协调汽车各控制单元及电器设备的工作。
接口设计
整车通信网络是由许多CAN 节点和L IN 节点通过CAN 总线和L IN 总线连接组成的一个局域网,因此接口设计十分重要。
图3 为中央控制器与CAN 总线、L IN 总线接口设计。中央控制器内包括了一个CAN 的控制器和一个SCI 接口。CAN 智能节点一般由MCU ,CAN 控制器和CAN 收发器组成。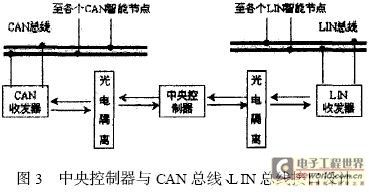
目前从事CAN 总线及L IN 总线芯片开发和制造的厂商很多,如PHIL IPS ,FREESCAL E ,ONSEMI , TI 等,设计人员可以根据自身需要选择不同的芯片组合。这里中央控制器选择了FREESCAL E 的MC68HC908AZ60 芯片。该芯片是专为汽车电子应用设计的功能强大的8 位单片机,内部集成了低速CAN 控制器,支持CAN2. 0A/ 2. 0B ,具有一个SCI 模块。该芯片除了完成L IN 网络与CAN网络的通信连接外,还兼有其它的控制功能。
L IN 节点选择了FREESC2AL E 的器件。其中L IN 节点收发器采用MC33399 ; L IN 节点MCU 选择MC68HC805 PV8 .由于汽车上的电磁干扰较大,为提高系统的抗干扰能力,在CAN 控制器和CAN 收发器以及L IN 控制器和L IN 收发器之间增加了由6N137 构成的光电隔离电路。
CAN 智能节点选择PHIL IPS 器件: PCA82C250 作为CAN 收发器; CAN 节点的MCU 选用P89C591 , 因P89C591 内部集成有CAN 控制器(有PeliCAN 接口) ,所以没有再选择CAN 控制器,其连接图如图4 所示。设计人员也可以选用微控制器+ 外接CAN 控制器这样的连接法。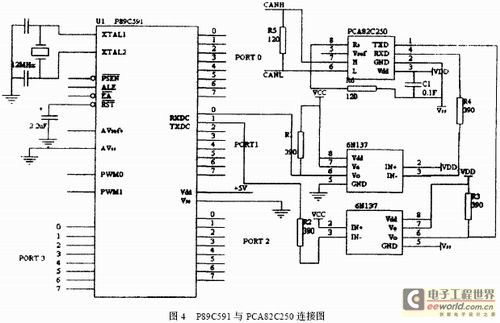
PCA82C250 提供对总线的差动发送能力和对CAN控制器的差动接收能力。在低速和总线长度较短时,一般采用斜率控制方式,以限制上升和下降斜率,降低射频干扰,斜率可通过调节由引脚8 至地连接的电阻进行控制。通信信号传输到导线的端点时会发生反射,反射信号会干扰正常信号的传输,因而总线两端需接终端电阻,以消除反射信号。其阻值约等于传输电缆的特性阻抗。
总结
基于CAN 总线A 类车身控制在汽车上已有广泛应用。随着车上总线节点的增加及高性能系统向中、低档汽车的发展,CAN 总线相对较高的实现成本就成为一种障碍。与CAN 相比,L IN 节点的通信成本是CAN 的1/ 3~1/ 2 ,具有较明显的成本优势。文中的汽车通信网络将L IN 应用于车身系统,既实现了应有的网络控制功能,又降低了开发、生产、服务的成本,具有较高的实用性。
- 现代电动车辆中电控技术应用(03-01)
- CAN总线混合动力汽车电控系统的设计与实现(08-29)
- 利用CAN总线的进行汽车轮速传感器系统设计(09-22)
- CAN总线在CFA6470混合动力汽车中的应用(09-25)
- 基于CAN总线的汽车发动机智能电子控制器研究(10-20)
- 基于CAN总线的电动汽车控制系统设计(05-25)