基于计算机视觉的汽车四轮定位技术研究
2.2 摄像机模型
针孔模型是由小孔成像原理推导出来的,是在简单的中心射影(又叫透视投影)基础上加入刚体变换(刚体的旋转与平移)得到的线性摄像机模型。它不考虑各种镜头的畸变,然而它却能很好的模拟实际摄像机,是其它模型和标定方法的基础。
设P是空间某点,其在摄像机坐标系下坐标为(Xc,Yc,Zc);q是P成像平面上的对应点,q的坐标为(x,y),设f为摄像机焦距,则根据透视投影的比例关系为式(4)。
2.3 求取坐标转换关系
作为求解参数过程的一部分,要预先拍摄目标盘,通过提取其图像上特征点的像素坐标得到目标盘特征点的世界坐标。这里将在针孔模型的基础上建立起世界坐标与理想图像像素坐标之间的转换关系。
已知目标盘盘面的几何特征和规则。将世界坐标系建立在盘面上,可已知特征点世界坐标,且Zw=0。设其中一点P(Xw,Yw,Zw)在摄像机坐标系下的坐标为(Xc,Yc,Zc),经拍摄后在CCD图像平面上成像,设其成像点坐标为(x,y),其图像像素坐标对应为(u,v)。
首先是空间坐标系的转换,根据计算机视觉理论,刚体运动可分解为旋转和平移的合成。可将世界坐标系转换到摄像机坐标系并变换为齐次坐标,如式(5)所示。
s是比例因子,H是单应性矩阵。由此可建立起图像坐标与世界坐标之间对应关系。再将已知的目标盘特征点世界坐标和提取出的图像像素坐标代入式(9),求出它们的转换关系,以用于后续计算。
2.4 定位参数求取
车轮的运动也可以看作是刚体运动,车轮上某点(由于目标盘与车轮运动相同,我们研究的是固定在车轮上的目标盘上某点)的运动分解成一个绕旋转轴的旋转和平移。
设车轮(目标盘)运动前后的一对对应点是P和P’,它们的世界坐标系坐标分别是(Xw,Yw,Zw)T和(Xw’,Yw’,Zw’)T,那么变换公式为式(10)。
其中R,T与式(5)中的表达形式完全相同,但其含义已经发生变化,这里用来描述在不同空间位置的变换过程,R中的θ为车轮上点绕旋转轴转动角度,(n1,n2,n3)为车轮旋转轴的空间向量;而式(5)中R,T是用来描述摄像机坐标系与世界坐标系之间的变换关系。
依据2.3所求出的坐标转换关系,将运动前后的空间目标盘世界坐标用其图像坐标求出,然后带入式(10),求出车轮运动的旋转轴向量(n1,n2,n3)。此向量与世界坐标系中各坐标轴Xw,Yw,Zw之间的夹角α,β,γ。进而利用夹角可求出定位参数。
为方便解释,如图6所示,设Zw为汽车前进方向,Xw指向汽车左侧,Yw垂直于车身平面,N车轮旋转轴向量,N’为N的平移,则β-900为车轮外倾角,arctan|cosγ/cosα|×1800/π为前束角。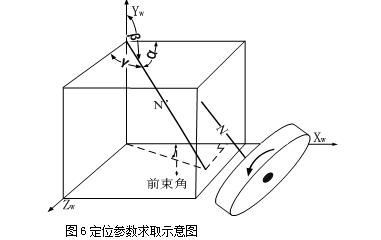
用相同的方法,拍摄汽车向左或向右转动一个角度时的图像,求取出主销的空间向量,进而求出主销内倾角和后倾角。
这种方式在原理上针对车轮旋转轴及主销,从其向量入手,推导过程虽比较复杂,但计算结果比较直接,对目标盘上图案形状、定位平台等要求较低,容易实现稳定的精确定位。
3、实验结果及分析
进行现场实验,分别用目前最先进的战车(JohnBean)图像式车轮定位仪和本文提出的基于空间向量的测量方法进行了车轮定位参数检测。实验车辆为大众高尔夫2004款轿车,验证本文方法时使用自制目标板,设置的规则图形为国际象棋盘图案,将目标盘固定在前后车轮上。如图7所示为部分实验图像。以对汽车左侧车轮进行检测为例,取多次测量结果平均值作为最终结果,实验结果见表1。从表1结果中可以看出,在误差允许范围内,本文方法测量结果与战车车轮定位仪测量结果基本一致,证明了本文所提出模型的正确性和有效性。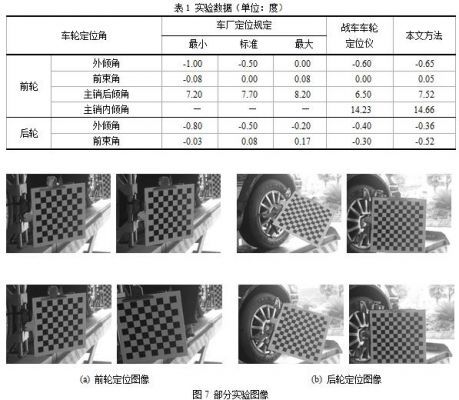
产生误差的主要原因是受自制目标板的精度以及图像噪声的影响,误差还受摄像机分辨率、摄像机标定、角点坐标提取精度等因素的影响。因此,要提高测量精度,目标板必须制作得尽量精确、摄像机的分辨率尽可能高并提高摄像机标定精度。
4、结论
基于计算机视觉的四轮定位方法充分利用了视觉理论,巧妙地运用了空间几何知识,实现了车轮定位参数的精确、快速、方便检测。本文针对基于透视学方式的原理和基于空间向量方式的原理进行了探讨与分析,给出了本文提出的基于空间向量方式的数学模型,实测实验证明了其正确性和有效性。为国内汽车电子检测行业提供了新思路和新技术。
- 基于单片机的AGV智能车的设计(04-27)