汽车电动空调的数据采集系统的研究
1 引言
汽车空调作为车内温度小环境的控制中心,其作用不言而喻。由于过去的汽车空调检测系统因为控制策略单调而没有使用综合检测平台的必要,即使有控制过程检测,大都使用昂贵的采集设备如数据采集卡,其通信方式也以串行口通信为主,无法接入整车环境进行监控[1]。针对这一情况,本文所设计开发的检测系统主要对电动汽车空调运行过程中的四个工程物理量进行检测分析:风机的电压、电流,压缩机端口的高压、低压。本课题来源于某汽车空调系统的开发过程中所需检测系统的设计,主要用于使空调系统的控制策略的执行更加透明化、直观化,为控制策略的优化提供数字依据;为汽车空调后续开发提供可靠的保证。
2采集系统设计
2.1总体设计
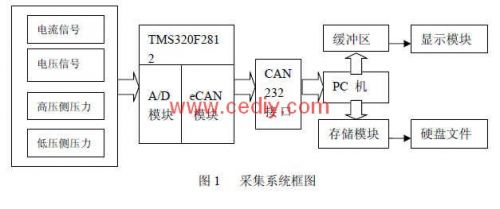
如图 1所示,在该系统中, DSP部分的软件设计主要完成以下工作:数据采集周期的设定、AD转换、数据校正及滤波等。并可以接收上位机通过 CAN总线发来的采集开始指令打开采集或关闭采集功能,在采集开始后按照要求对四路信号进行采样及软件校正,校正完成后将采集结果保存在 CAN邮箱内,通过 CAN控制模块进行发送。在本系统中,电压、电流采
2.2硬件部分
以 TI公司的 TMS320F2812为该四通道数据采集系统的核心。该款 DSP芯片是 TI公司 2000系列中的一员,最高主频可达到 150MHz,具有强大的数字信号处理能力[2]。片内集成的 12位 AD转换器共有 16个通道,转换速率在可达到 12.5MSPS(ADC时钟为 25MHz时),在采集速度及精度上均能达到本系统的设计要求。而且该 AD模块可采用多种方式触发能够满足不同的任务需要。输入 2812 AD端的模拟信号由传感器采集变换得到。本系统所用传感器输出信号为 4~20mA的电流环信号,而 AD模拟输入范围为 0~3V电压信号。
CAN是控制器区域网络( Control Area Network)的简称,最早是由德国 BOSCH公司推出的,用于汽车内部测量与执行部件间的数据通信,其总线规范现已被 ISO国际标准制定为国际标准[3]。它广泛的应用于汽车电子、工业控制,其信号传输介质为普通双绞线,通信速率最高可达 1Mbps。CAN总线具有较强的抗干扰能力。本系统采用 CAN总线的通信方式,也方便了整车调试的接入。
2.3软件部分设计
2.3.1 DSP软件部分
该部分软件主要包括两个部分:模拟信号的 AD转换和CAN总线通信。因为TMS320F2812内置有 12位 AD转换器,因此转换部分可分为 AD模块配置和数据转换处理;而 AD模块的配置主要包括工作和通道的选择。在本系统中,选用连续转换方式;需要采集的模拟量共四个,加上 A、B通道各配置两个校正输入端口,所以总共需要占用 8个模拟输入口。
50ms200ms集周期为,高、低压采样周期为 。 部分配置程序如下: …
AdcRegs.ADCTRL1.bit.SEQ_CASC = 0; //双排序发生
AdcRegs.ADCTRL1.bit.CONT_RUN = 1; //连续转换方式
AdcRegs.ADCTRL1.bit.CPS = 0; //分频系数为 1
AdcRegs.ADCMAXCONV.all = 0x0055; //共有 12个转换,采样值取 2次,标准值 1次
AdcRegs.ADCCHSELSEQ1.all = 0x1100;//转换序列
CAN总线通信主要包括 TMS320F2812中 eCAN模块邮箱的定义和邮箱中断子程序的设置[6]。
部分配置程序如下:
ECanaMboxes.MBOX0.MSGID.all = 0x003FFFFF; // mail0:00F
ECanaMboxes.MBOX5.MSGID.all = 0x0FFFFFFF; // mail5:3FF
// Configure Mailboxes 0-3 as Tx, 4,5 as Rx
ECanaRegs.CANMD.all = 0x00000030; // Enable Mailboxes
ECanaRegs.CANME.all = 0x0000003F; // Specify that 2 bits will be sent
CAN模块有两种中断形式,一种是与邮箱有关的中断,另一种是系统中断,用于处理错误
或者与系统相关的中断源[4]。而本系统中 CAN与上位机通信主要是通过邮箱中断来实现。
CAN邮箱的中断程序如下:
interrupt void can_send(void)
{
if((((int) ECanaRegs.CANGIF1.all)<0) && (ECanaRegs.CANGIF1.bit.MIV1==4))
{ IER |=M_INT1;} if((((int) ECanaRegs.CANGIF1.all)<0) && (ECanaRegs.CANGIF1.bit.MIV1==5)) { IER = M_INT9;} PieCtrlRegs.PIEACK.bit.ACK9 = 0x1;
}
以高电压为例来说明本系统在数据采集、数据转换及发送的相应任务。
Pre_High= AdcRegs.ADCRESULT6 >> 4 + AdcRegs.ADCRESULT7 >> 4; Pre_High = Pre_High << 1; //高电压值 Pre_High = Ave_cur * CalGain - CalOffset *CalGain; ECanaMboxes.MBOX2.MDL.word.LOW_WORD = Pre_High; ECanaRegs.CANTRS.all=0x0000000C;
while(ECanaRegs.CANTA.all!=0x0000000C){} ECanaRegs.CANTA.all=0x0000000C;
经实际运行证明执行结果达到了设计需要,说明该部分
- 汽车HVAC系统中的传感器(02-23)
- 传感器在汽车HVAC系统中的应用(04-18)