基于CAN总线的自动离合器控制器设计
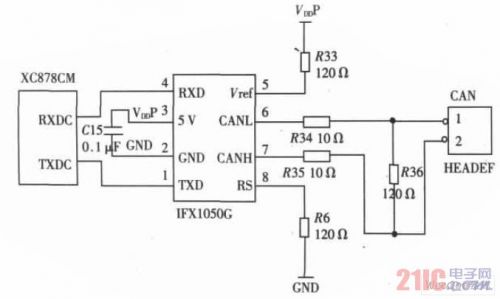
图3 CAN 节点的接口电路图
3 软件设计
电控单元ECU 的控制软件主要由离合器控制程序和CAN 总线通信程序组成。
3.1 离合器控制软件设计
离合器的控制程序包括三个部分: 离合器分离控制程序、起步结合控制程序、换挡结合控制程序。其中分离控制程序比较简单,ECU 得到分离指令后, 离合器全速分离, 并且准确地在完全分离点停止即可。离合器的控制难点在于起步结合控制。离合器的起步结合过程既要保证车辆起步的平稳性、舒适性、起步不熄火, 又要保证起步的快速性, 减少滑摩功的产生, 延长离合器使用寿命。因此, 要取得较好的控制效果除了对离合器的结合量进行控制外, 还要对离合器的结合速度进行控制, 并通过与发动机的协调控制, 提高控制效果。图4 为起步结合控制软件流程图。换挡过程中离合器的结合控制与起步控制在控制策略上类似, 在此不再赘述。
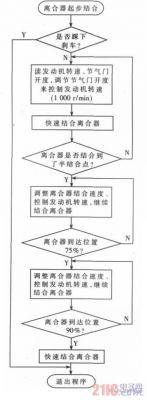
图4 起步结合控制软件流程图
3.2 CAN 通信协议设计
CAN 通信协议包括物理层、数据链路层和应用层。物理层和数据链路层是通过硬件实现的, 在使用CAN 通信时, 需要开发者自行定义应用层协议。构造应用层协议的主要任务是ID 分配、定义消息周期、确定信号与消息的映射关系。设计要考虑的主要因素有数据传输的实时性要求、数据的相对重要程度、与数据相关的应用控制算法对数据的时间要求等。国际上存在一些现有的标准, 如CANopen 、SAE J1939 等。
在一些利用简单的通信协议就可以满足要求的情况下, 采用复杂的协议会造成资源浪费, 用户在应用时也会觉得诸多不便, 反而限制了灵活性。本文设计的CAN 总线网络中仅有离合器控制器和发动机控制器两个节点。针对仅有两个节点的实验平台, 本文从协议实现的代码量、目标系统的信息量、软件的开发成本等角度出发, 定义一种简单可靠的CAN 协议。具体的通信协议定义如表2 所示, 标识符用来表示信息的优先级, 标识符越小优先级越高。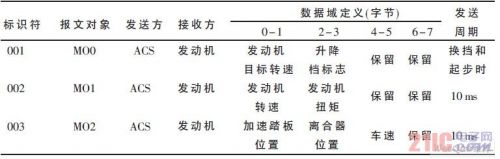
表2 CAN 总线通信协议
4 CAN 通信测试实验
本文实验是在自行搭建的离合器模拟实验平台上进行的。本实验平台是由离合器控制板、加速踏板、刹车踏板、相关传感器、离合器执行机构及发动机模拟控制板组成。离合器控制板与发动机模拟控制板之间通过CAN 总线通信。图5 为实验过程中通过CAN 总线传送的档位变化信息, 图6 为通过CAN 总线传递的加速踏板开度信号。
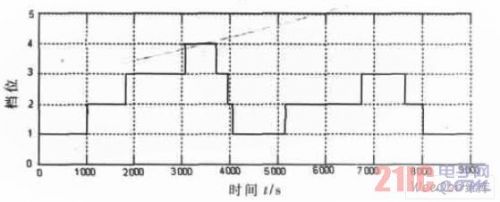
图5 档位信息
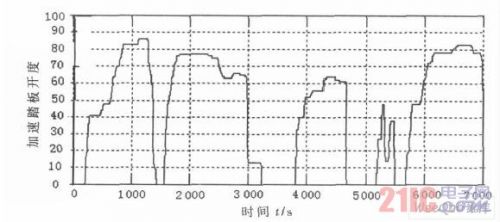
图6 加速踏板开度信号
本文提出了一套电控自动离合器的控制器方案, 并进行了系统的软硬件开发, 初步实现了自动离合器的基本功能, 设计了CAN 总线接口。在实验平台上验证了控制器方案及CAN 通信模块的可行性和可靠性, 为实车试验打下基础。
- 英飞菱柴油发动机管理应用方案(02-13)
- 英飞菱汽油发动机管理应用方案(02-13)
- 英飞凌发动机启动电机控制解决方案(02-13)
- 欧盟认可氢燃料内燃发动机为未来技术(02-14)
- 用电附件过载引发汽车电源设计新思考(02-23)
- 汽车控制系统中螺线管电流的测量(02-21)