基于英飞凌产品的汽车EPS技术方案
随着汽车保有量的不断增长,汽车排放对环境的污染被加以越来越多的重视,而日益严格的排放标准的不断推出更使环保成为汽车必须要达成的一个指标。此外,随着汽车消费的不断成熟,消费者也越来越关注汽车的各种功能性的内在指标。作为传统液压助力转向系统(Hydraulic Power Steering,HPS)和电动液压助力转向系统(Electro-Hydraulic Power Steering,EHPS)技术的替代者,电动助力转向系统(Electric Power Steering,EPS)正由于其具有的优点而被应用在越来越多的车辆中。表1是咨询公司Strategy Analytics对中国EPS市场的预测,从中我们可以明显地看出这种不断增长的趋势,预计在2010-2017年期间中国的EPS市场的年复合增长率将达到16.9%。

这种不断增长的市场趋势是由于EPS系统本身具有的诸多优点所决定的,这主要表现在:
EPS能在各种行驶工况下提供最佳助力,减小扰动,改善汽车的转向特性,提高汽车高速行驶时的转向稳定性,进而提高汽车的主动安全性。
EPS只在转向时电机才提供助力,因而能减少燃料消耗。统计数字表明,与HPS相比,EPS每百公里可节油约0.3至0.5升。
EPS电机由蓄电池供电,因此即使在发动机熄火或出现故障时也能提供助力。
EPS取消了液压结构,其零件比HPS大为减少,因而质量更轻、结构更紧凑,易于设计和安装,并能降低噪声。
EPS易于调整和检测,可以通过设置不同的程序,快速与不同车型匹配,因而能缩短生产和开发周期。
EPS不存在渗油问题,可大大降低保修成本,减小对环境的污染,改善了环保性。
EPS比HPS具有更好的低温工作性能。
可实现自动泊车系统等辅助功能。
对于EPS需求的增加也促使众多的企业和科研单位加大了研发和生产的投入,从而催生了许多新的EPS系统生产企业进入市场。这种现象在中国和印度等新兴市场表现得尤为明显。但这些企业生产EPS产品的历史都不长,所以一个成熟而可靠的方案对他们来说尤为重要。下面将简单介绍一下EPS系统的类型、一般结构和特性。
EPS简介
EPS是通过电机的动力直接给转向系统提供辅助扭矩的系统。它依靠检测发动机,方向盘,车速等信息来判断并提供合适的转向助力,使得转向过程能够精确、轻松、安全地完成。
通常来说,根根据电机安装位置和机械结构的不同,EPS系统可以分为:管柱助力式、小齿轮助力式、双小齿轮助力式和齿条助力式。图1给出了各类EPS系统的机械机构,输出力矩和适用车型的简单介绍。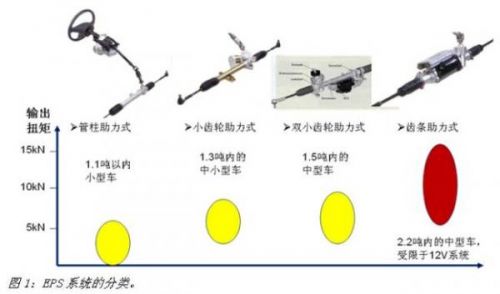
管柱助力式EPS系统将电机安装在转向管柱上,通过减速机构与转向轴相连,其特点是结构紧凑,所测得的转矩信号与方向盘转矩在同一直线,因此控制电机助力的响应性较好,但对电机的噪声和震动要求较高。另外由于电机、ECU和减速机构都布置在驾驶舱内,电机和ECU的工作环境较好,且方便发动机舱布置。小齿轮助力式EPS系统将助力电机安装在转向小齿轮处,直接给小齿轮助力,因此可以提供较大的助力扭矩而适用于稍大的车型,但由于万向节的存在,会影响助力控制特性的精确度。双小齿轮助力式EPS系统由于增加了一对齿轮齿条而能提供比小齿轮助力式更大的助力,但是成本上也略高。而齿条助力式EPS系统能提供更大的助力,但整套系统结构复杂,成本较高,所以适用于豪华车和商务车上。
各类型的EPS系统工作原理基本相同。如图2所示,通常一个EPS系统主要由转向部件、传感器、电机、减速机构和电子控制单元(ECU)等组成。当司机转向时,传感器检测到方向盘上的扭矩和转角的大小,将其转化为数字信号并传给电子控制单元,电子控制单元根据这些信号与预先设定的算法计算出最适合当时行驶工况的输出力矩,并发出信号驱动电机工作,电机输出的力矩由传动系统输给转向机构而进行助力。
为了使这个转向的过程顺利实现,EPS系统需要实现以下功能:
助力控制:在汽车停车及低速行驶时提供较大辅助力矩,使转向过程快捷轻便地进行,而在汽车高速行驶时提供较小的辅助力矩以保持转向过程的可靠与沉稳。
回正控制:确保汽车从直行状态到大角度转向的过程中回正力矩相应地逐渐提高。另外,确保汽车在非转向状态下的直线行驶性能,并防止汽车在不同车速下实现回正时出现回正不足或回正超调的现象。
阻尼控制:利用电机感应电动势来减弱汽车高速行驶时出现的方向盘抖动现象,消除转向轮因路面不平而引起的方向盘摆振,并在汽车高速行驶时,给转向过程增加一定的阻尼,克服转向发飘的感觉。
分析诊断功能:应能实时监控运行状态,并具有故障报警和提示功能,在故障不能自动排除时关断EPS使车辆进入传统的机械转向模式。
通讯功能:应具有通过CAN或LIN
- 基于LabVIEW的汽车助力转向控制系统设计(09-11)
- 采用PIC16F877单片机的汽车电动助力转向系统(01-07)
- 常见的动力转向系统详解(04-28)
- 汽车电动助力转向系统扭矩传感器技术详解(05-22)
- 汽车电动助力转向系统EPS原理详解(06-05)
- 采用PIC16F877的汽车电动助力转向系统(06-29)