基于AVR的防汽车追尾安全装置设计
采用并行128x64液晶屏,虽然占用较多的I/O端口,但并行传输便于编写驱动程序,如果系统单片机不能提供足够的I/O端口,可选择串行数据传输的液晶显示屏。另外,为了让司机能够更方便地看到设计系统所测得的数据,应将显示设备放置于司机主控台视线合理位置。
3 系统软件设计
控制部分由ATmega8L控制完成,主要功能为:计算本车速度、车间距离,测定加速度,并通过LCD实时显示;实际车间距离和安全车间距离的比较发出报警声或报警灯闪烁;刹车时的加速度与设定阈值相比,决定是否点亮LED刹车灯,系统软件设计流程如图6所示。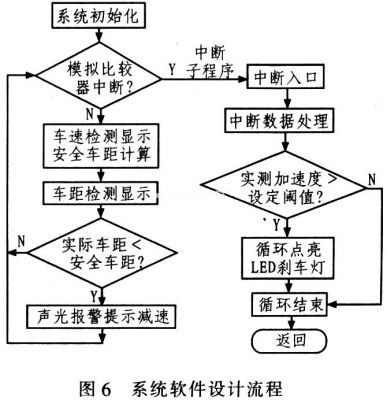
在加速度测定中,考虑到汽车行驶当中的振动和噪声等影响信号输出,还需进行必要的软件滤波处理,这里采取数据平均值方法。据《中华人民共和国道路交通安全法实施条例》,安全行车距离与行车速度关系模型如下:当v≥100 km/h时,S>100 m;当v<100 km/h时,S>vt/1 000 m;其中,S为安全行车间距,单位为m;v为本车时速,单位km/h;t为每小时。高速公路上S>50 m。软件设计主程序代码如下:
car_speed();//汽车时速监测,返回值为i
lcd_display(i,1);//第一行实时显示车速
car_distance();//车距监测,返回值为j
lcd_display(j,2);//第二行实时显示车距
car_cmpl(i,j);//比较车距与安全车距,确定是否报警
#pragma interrupt_handler ana_comp_isr:17
car_acc();//加速度监测,返回值为k
car_cmp2(k);//实际加速度与设定阈值的比较,确定是否点亮LED刹车灯
主程序在车辆开启后一直循环执行,直至车辆电源关闭。
4 结束语
该设计采用功能模块化技术,易于操作及扩展;选用性价比较高的器件,具有良好的应用和市场前景。设计方案切实可行,对于汽车防追尾具有重要意义。另外,设计所采用的加速度传感器还可作为汽车防盗的震动信号监测。
- 加速度传感器在汽车防盗系统中的应用研究(06-05)
- 双轴加速度传感器在车载电子罗盘应用中的抗干扰设计(07-18)
- ADXL202在组合车载导航系统中的应用(09-15)
- 汽车ESP传感器及其接口技术详解(01-18)
- 汽车应用中的磁阻传感器 (02-18)
- 基于AMR磁阻传感器和加速度传感器的电子罗盘(10-04)