数字形态学滤波器与智能车路径记忆
引言
"飞思卡尔"杯全国大学生智能车竞赛规则明确指出,智能车在赛道上连续跑两圈,并记录其中最好的单圈成绩,这使路径记忆算法成为可能。如图1所示,赛道记忆算法在第一圈以最安全的速度缓慢驶过一圈,并将赛道信息保存下来,第二圈根据保存下来的信息进行车速和转角决策的相应最优化,从而在第二圈取得好成绩。无论智能车的传感器前瞻距离有多远,在跑圈时它都只能预测在一段有限距离内赛道的情况。而采用赛道记忆算法的智能车,在第二圈时已对整个赛道有了全面的认识,从而在相同条件下,将比不使用赛道记忆的智能车更具优势。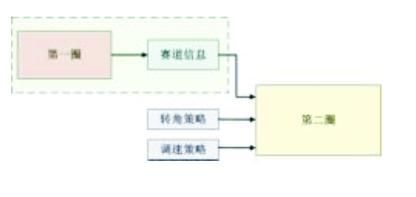
第一圈准确记忆赛道信息是第二圈控制策略的基础,是比赛成败的关键。但是在第一圈中不论控制策略如何优秀,赛车总会或多或少的偏离赛道,舵机的转角信息总会出现一定程度的毛刺和扰动等粗大误差,其幅值足以引起处理器的误判。如果不加处理直接应用于第二圈控制,会对赛车造成严重干扰,不能以极限速度跑完比赛或者冲出赛道。通常的处理方法有两种:一是通过阈值比较丢弃干扰值,但同时赛道信息也会同干扰信息一起被丢弃;二是通过低通滤波将干扰平均到多个位置,但同时破坏了赛道原始信息,而且在干扰幅值很大的时候效果也不是很明显。
数学形态学(Mathematical Morphology)是一种新型的数字图像处理方法和理论,其主要内容是设计一整套的变换(运算)、概念和算法,用以描述图像的基本特征。提供了非常有效的非线性滤波技术,该技术只取决于信号的局部形状特征。因此,它在诸如形状分析、模式识别、视觉校验、计算机视觉等方面,要比传统的线性滤波更为有效。
算法的选取与实验结果对比
数学形态学的运算以腐蚀和膨胀这两种基本运算为基础,引出了其它几个常用的数学形态运算。数学形态学中最常见的基本运算只有七种,分别为:腐蚀、膨胀、开运算、闭运算、击中、细化和粗化,它们是全部形态学的基础。它们的定义如下:
设X代表一个数字图像,我们假定该图像是二值的,即取值只有1或0,则X表示一个二进制信号集合,B是一个简单的紧集合,称为"结构元素"。X被B膨胀和腐蚀的结果可以分别定义为: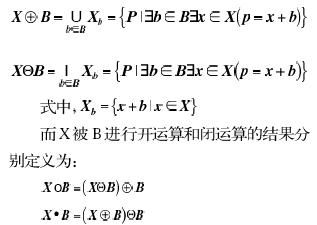
在数字图形处理领域中,数学形态学主要用于非线性变形,它可以局部地修改信号的几何特征,并提供有关信号的几何特征信息。根据不同的信号的形态特征,可以采用不同的数学形态学运算对信号进行处理,这些数学形态与运算都被视为数学形态滤波器。在这种应用方法中,每一个信号都被视为适当的维数的欧几里德空间中的集合。数学形态滤波器被定义为集合的运算,它使信号的图形变形,以提供关于其几何结构的数字化信息。对于被视为集合的二进制信号,腐蚀、膨胀、开运算和闭运算是最简单的形态运算。这些滤波器还可以引申到多维信号中去。此时,形态滤波器利用的是灰值图的数学形态运算的定义。下面将探讨如何将数学形态滤波器应用到舵机转角信号(一维数字信号)的处理中,实现去除脉冲噪声和减小扰动,以及在单片机上编程实现和快速运算的方法。
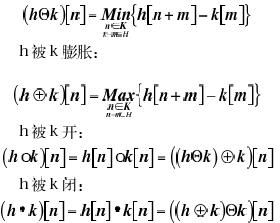
数学形态滤波器通常是用在二维图形的处理,为把数学形态滤波器推广到一维的信号的处理中,下面再介绍一下腐蚀、膨胀、开运算和闭运算这一个基本运算在一维信号处理中的定义:
设H、K分别为h[n]和k[n]的定义域,长度分别为N和M,一般N>M。H和K均为整数集合。
h[n]指包含舵机转角信号的数字化序列,k[n]指结构元素序列。
h被k腐蚀:
采用数字形态滤波方法,还要选用合理的算法。其中,如何选取模板序列的长度是关键,如果模板序列过长会将有用信号当作噪声滤除,过短则达不到滤除噪声的目的。在采样速率一定的情况下,序列的长度与时间成正比,这要求模板的长度要小于模型车的最小转弯时间,大于舵机扰动的最长时间。第一圈让模型车匀速通过,这样处理有两个优点:
1) 可以固定最小转弯时间,从而确定模板的长度。非匀速通过时速转弯时间不定,要求模板长度可变,从而造成后续处理复杂,稳定性不高。
2) 采样序列的顺序可以直接转化为位移量,便于后续控制策略处理。相对于非匀速通过速度与时间乘积得到的位移,直接转化得到的位移更准确(在标准的韩国赛道上,实验模型车直接转化得到的赛道长度误差小于5cm,速度与时间乘积得到赛道长度误差在10cm以上)。
实验系统在图2所示的赛道上,智能车对赛道信息的采样速率为200Hz,以1.5m/s的速度匀速跑完第一圈的数据如图3所示。可以看到在弯道中,舵机的转角信息存在着严重的毛刺和扰动,不能直接用于第二圈的控制策略。图4为matlab中采用3阶巴特沃兹滤波处理后的结果,干扰的
- 一种基于数学形态学和Hough变换的车牌图像检测及定位算法(03-24)
- 基于16位单片机MC9S12DG128的智能车控制系统设计与实现(11-11)
- 基于9S12DG128的智能车控制系统设计与实现(08-27)
- 数字CMOS摄像头在智能车中的应用(08-29)
- 基于电磁场检测的寻线智能车设计(09-22)
- 基于载流导线循迹智能车的数学模型(10-12)