汽车线控技术的应用及发展趋势分析研究
随着汽车电子技术、自动控制技术的逐步成熟和汽车网络通讯技术的广泛应用,汽车线控技术也逐步得到青睐和深进研究,它和42V电压系统和网络技术左右着汽车未来的发展趋势。
汽车线控技术就是将驾驶员的操纵动作经过传感器变成电信号,通过电缆直接传输到执行机构的一种系统。目前的线控技术包括线控换档系统、线控制动系统、线控悬架系统、线控增压系统、线控油门系统及线控转向系统。其中线控转向系统在高级轿车、跑车及概念车上有广泛的应用,它为自动驾驶提供了良好的平台;线控制动系统在产业车辆上应用较多,将来随着线控技术的成熟和本钱的降低及追求自动驾驶的影响,线控技术将会越来越多地应用于普通车辆。本文主要介绍汽车线控制动系统和线控转向系统。
1 线控制动系统
线控制动系统(BBW,Brake 2 By 2 Wire),目前分为两类,一种为电液制动系统(EHB,Electro2Hy2draulic Brake),另一种为电子机械制动系统(EMB,Electro2Mechanical B rake)。EHB是电子与液压系统相结合所形成的多用途、多形式的制动系统,它由电子系统提供柔性控制,液压系统提供动力;而EMB则将传统制动系统中的液压油或空气等传力介质完全由电制动取代,是未来制动控制系统的发展方向。
1.1电液制动系统
在中小型车辆的传统制动系统中,驾驶员通过制动主缸在轮缸建立制动压力,而EHB则是通过蓄能器提供制动压力。蓄能器压力由柱塞泵产生,可提供多次连续的制动压力。EHB由传感器、ECU及执行器(液压控制单元)等构成,其结构如图1所示。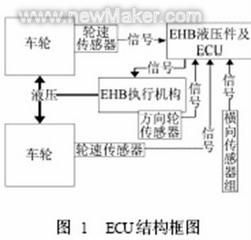
制动踏板与制动器间无直接动力传递。制动时,制动力由ECU和执行器控制,踏板行程传感器将信号传给ECU,ECU汇集轮速传感器、转向传感器等各路信号,根据车辆行驶状态计算出每个车轮的最大制动力,并发出指令给执行器的蓄能器来执行各车轮的制动。高压蓄能器能快速而精确地提供轮缸所需的制动压力。同时,控制系统也可接受其他电子辅助系统(例如ABS、BAS、EBD、ESP等)的传感器信号,从而保证最佳的减速度和行驶稳定性。
与EMB相比,EHB具有如下优点:(1)不需要车轮制动器四周的额外空间,也不会额外增加重量。(2)为降低能耗,经过良好设计的14V电源能充分满足要求。(3)在紧急情况下,制动主缸的压力还可直接施加给两个前轮,因而不需备用系统。因此,就目前而言EHB是实现BBW的第一步,对于重型车辆或产业车辆,只有液压系统可以产生较大的制动力矩,以满足大吨位车辆的制动要求。(4)能够改善系统的性能和操纵职员的舒适性。制动阀可安装在阔别驾驶室更接近于制动器的位置,以减少管路消耗。无需采用更多的液压阀及管路就能使远程操纵更轻易。
1.2电子机械制动系统
EMB主要用于小型车辆中,主要包含电制动器、ECU、轮速传感器、动力电源等。它与EHB最大区别是制动力为电机提供的转矩,而不是由柱塞泵产生的高压油,且有独立的电源来供电,其各部分的功能如表1。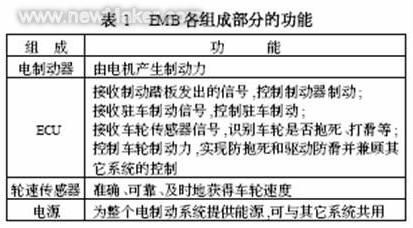
与其它传统制动控制系统相比,EMB具有如下优点:(1)系统结构简单,省往大量管路系统及部件;(2)制动响应时间短,进步了制动性能;(3)系统制造、装配、测试简单快捷,采用模块化结构,维护简单;(4)采用电线连接,系统耐久性能良好;(5)易于改进,略加变化即可增设各种电控制功能。但是与EHB相比,它仍有以下几个题目需要解决:(1)驱动电源题目。目前车辆的12V电源系统无法提供如此大的能量,需采用高质量的42V电源。(2)控制系统失效题目。由于不存在独立的主动备用制动系统,为了确保安全,需要一个备用系统,因而也增加了本钱。(3)抗干扰题目。车辆在运行过程中会有各种干扰信号,如何消除这些干扰信号造成的影响是急需解决的题目。
2 线控转向系统
线控转向系统(SBW,Steering2By2W ire)往掉了转向盘和转向轮之间的机械连接,减轻了大约5kg重量,消除了路面的冲击,具有降低噪声和隔振等优点。目前国外著名汽车公司和汽车零部件厂家竞相研究具有智能化的新一代转向系统,如美国Delphi公司、TRW公司、日木三菱公司、Koyo公司、德国Bosch公司、ZF公司、BMW公司等都相继在研制各自的SBW系统,国内也开始涉足这一相关研究领域。
SBW系统由方向盘模块、转向执行模块和ECU3个主要部分以及自动防故障系统、电源等辅助模块组成,其结构如图2所示。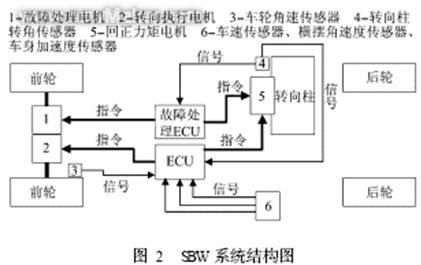
方向盘模块包括方向盘、方向盘转角、力矩传感器、方向盘回正力矩电机。方向盘模块的主要功能是将驾驶员的转向意图(通过丈量方向盘转角)转换成数字信号并传递给主控制器;同时接受ECU送来的力矩信号,产生方向盘回正力矩以提供给驾驶员相
- 汽车电子新技术综述(03-11)
- 盘点五种底盘控制技术设备(08-07)