飞思卡尔智能车舵机和测速的控制设计与实现
时间:01-15
来源:电子设计工程
点击:
。为了使得车模能够平稳地沿着赛道行驶,除控制前轮转向舵机以外,还需要控制好各种路况的车速,使得车模在急转弯和下坡时不会因速度过快而冲出赛道。因此,利用霍尔传感器检测车模瞬时速度,实现对车模速度的闭环反馈控制,小车的PC9S12控制板能够根据赛道路况变化而相应执行软件给定的加速、减速、刹车等指令,在最短的时间内由当前速度转变为期望的速度,使得车模快速平稳行驶。
基于霍尔效应,固定在转盘附近的霍尔传感器便可在每个小钢磁通过时产生一个相应的脉冲,检测出单位时间的脉冲数,便可知被测转速。霍尔传感测速装置示意图如图5所示。显然不是安装小钢磁越多越好,在一定的条件允许范围内,磁性转盘上小钢磁的数目越多,确定传感器测量转速的分辨率也越高,速度控制也越精确。一般4~8片是最佳范围。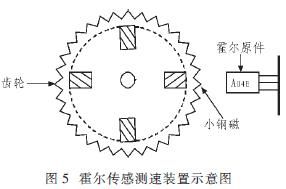
4 结束语
为了参加第四届"飞思卡尔"杯全国大学生智能汽车竞赛,此设计方案在校级代表队资格选拔赛中表现完美,最终跑出 19.7 s的好成绩,成功入选。实践证明了智能车舵机控制转向和霍尔控制测速优化方案具有可行性和实用性。
- 基于16位单片机MC9S12DG128的智能车控制系统设计与实现(11-11)
- 基于9S12DG128的智能车控制系统设计与实现(08-27)
- 数字CMOS摄像头在智能车中的应用(08-29)
- 基于电磁场检测的寻线智能车设计(09-22)
- 基于载流导线循迹智能车的数学模型(10-12)
- 一种非均匀行采集的智能车路径识别算法(10-22)