CAN总线在汽车行驶记录仪中的应用
00具有PCA82C200模式(即默认的Basic CAN模式),基本特性如下:1)具有PCA82C200模式(即默认的Basic CAN模式);2)支持CAN2.OA和CAN2.OB协议;3)支持11位和29位标识符;4)通信的位速率可达1 Mb/s;5)采用的是24 MHz时钟频率;6)可与不同的微处理器相接;7)可编程的CAN输出驱动器配置;8)温度适应范围大(-40~+125℃)。
此外,还具有PeliCAN模式扩展功能:1)可读/可访问的错误计数寄存器;2)可编程的错误报警限额寄存器;3)最近一次错误代码寄存器;4)对每一 个CAN总线错误的中断;5)有具体位表示的仲裁丢失中断;6)单次发送(无重复);7)只听模式(无确认、无激活的错误标志);8)支持热插拔(软件位 速率检测);9)验收滤波器的扩展(4字节的验收代码,4字节的屏蔽);10)接收自身报文(自接收请求)。
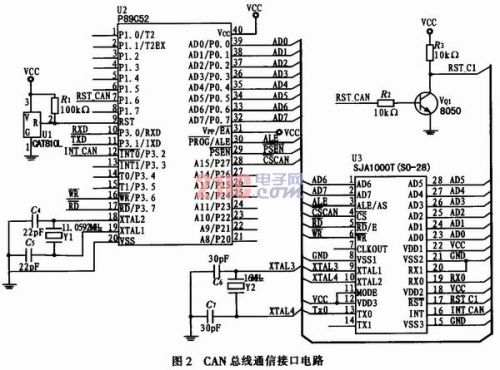
图2所示为SJA1000与微处理器通信接口电路。SJA1000的复位信号RST为低电平有效。
3.2 CAN总线收发器隔离电路
CAN总线收发器采用了标准的高速CAN收发器TJAl050,该收发器是CAN协议控制器和物理总线之间的接口。TJAl050可以为总线提供差动发送 性能,为CAN控制器提供差动接收性能。TJAl050除了增强EMC外,另外一个重要的特性是不上电时,CAN总线呈现无源特性。这使TJAl050在 性能上大大优于其他CAN总线收发器。TJAl050有高速和静音2种工作模式,都由引脚S控制。引脚S接地可以进入高速模式,由于引脚S有内部下拉功 能,所以当它没接时,高速模式也是默认模式。在高速模式中,总线输出信号有固定的频率,并且以尽量快的速度切换,适用于最大的位速率和最大的总线长度。将 引脚S接高电平,就可进入静音模式。在静音模式中,发送器是禁止的,不管TXD的输入信号。因此,TJA1 050在非发送状态中,它此时消耗的电源电流和隐形状态时一样。TJAl050最低的波特率为20 Kb/s。
为了确保在CAN总线遭受严重干扰时控制器能够正常运行,CAN总线控制器没有与总线收发模块直接相连,而是通过光电隔离器6N137后相连,从而实现总 线上各节点间的电气隔离。电路图如图3所示。6N137光耦合器的第6引脚Vo输出电路属于集电极开路电路,必须上拉一个电阻;另外其第2引脚和3引脚之 间是一个LED,必须串接一个限流电阻,此外,光电耦合部分所采用的两个电源VCC和CAN的+5 V必须完全隔离。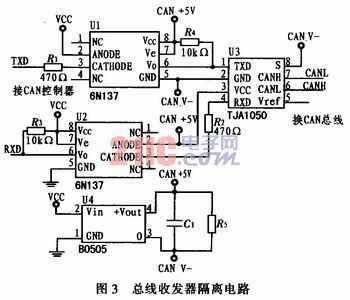
3.3 RS232总线接口模块
RS232总线接口主要实现汽车行驶记录仪与PC机的RS232串口通信功能。MAX232芯片是常用的RS-232C与TTL电平转换器,它的内部有电压倍增电路和转换电路,只需+5 V电源便可实现RS-232C与TTL电平转换,使用方便,一个芯片可连接2对收/发信号线。因此转换器采用MAX23 2。其接口原理图如图4所示。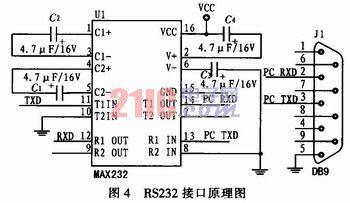
4 软件设计
在软件设计之前,为了确保SJAl000的片选地址与其他的外部存储器无冲突,需先确定SJAl000的基地址及复位引脚,然后正确地初始化SJAl000。CAN接口电路的软件设计主流程图如图5所示,主要包括CAN控制器的初始化、数据发送、数据接收及出错处理等。
SJAl000的初始化只有在复位模式下才可以进行,初始化主要包括工作方式的设置,接收滤波方式的设置,接收屏蔽寄存器和接收代码寄存器的设置,波特率参数设置和中断允许寄存器的设置等。其初始化流程如图6所示。
CAN发送数据流程如图7所示,接收数据流程如图8所示。此程序以采集行驶车辆行驶速度和压力数据为例。
5 结束语
CAN总线的应用,使汽车行驶记录仪的信号采样系统简化,降低了对MCU处理单元的性能要求,提高了汽车行驶记录仪稳定性,可在RS232通信节点中建立 多点远程通信,其硬件和软件设计上都有所创新,使记录仪安装更为简便,具有很好的性价比和很强的可移植性和扩充性。
- 汽车行驶记录系统中AT89C51ED2的设计与实现(02-24)
- 基于3G和行驶记录仪的车辆调度监控系统设计(04-11)
- 基于uClinux的汽车黑匣子的设计(06-28)
- 串口扩展芯片在汽车行驶记录仪中的应用(09-29)
- 基于AT91SAM926的汽车记录仪方案(02-18)
- 基于MCU的无线行驶记录仪硬软件设计(05-17)