ADXL202在组合车载导航系统中的应用
CPLD设计
在应用车载导航系统中,不可避免的会遇到雷雨天气,以及山岭洼地等路径,这样的条件,自然会对GPS信号产生严重的干扰。为了减少定位的不准确,在使用GPS接收机定位的同时,利用加速度传感器来进一步定位。 CPLD主要实现两路信号占空比的计算。
CPLD的处理过程如图3所示: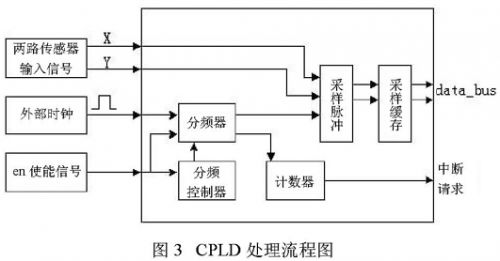
记数控制器用于对分频器进行控制,使分频器的输出信号频率为传感器输出频率的1000倍。由分频器输出的信号对传感器输出信号进行采样,统计一个周期内采样值为1的个数,并保存在缓存中。
计数器记满之后,触发中断,通知CPU读取数据。
为了低功耗考虑,通过使能信号EN来控制整个CPLD是否工作。EN信号可以由EP7312的GPIO口控制。
应用软件设计
我们在Windows CE操作系统平台上开发导航程序。Windows CE是Microsoft Windows公司出品的小型的、基于ROM的、具有Win32子集API的操作系统,与其它嵌入式操作系统相比较,具有较强的内存管理、文件管理和 GUI功能。而车载导航系统中,对于显示地图调度、用户交互界面都有很高的要求。因此,基于Windows CE开发应用程序是非常合适的。
车载导航系统应用程序是一个多任务程序,启动后,初始化与GPS接收机ITRAX02相连的处理器串口 1、与ADXL202相连的处理器串口2和与彩色LCD屏相连用于显示车辆行驶位置的LCD控制器。作为中央处理器,EP7312实时监听串口1和串口2 中断信号。当ADXL202的脉冲调制信号经由CPLD换算为占空比值送入处理器,就会引发相应的串口中断。
EP7312检测到中断信号时,由中断控制器判断找到相应中断服务程序的入口地址,调用程序进行处理;当GPS接收到一帧卫星信号时,也引发相应的串口中断,由中断控制器判断找到相应中断服务程序的入口地址,调用程序进行处理。处理占空比值的中断服务程序首先缓冲接收到的数据,滤波后经过两次积分得到一个周期内的相对位移,记录下来退出,交出CPU使用权;处理GPS数据的中断服务程序首先缓冲接收到的数据,按照事先约定的格式,从中提取方向和位置信息,记录下来,退出并交出CPU 使用权。数据处理任务主要是将相对位移数据与GPS位置数据通过分布数字卡尔曼滤波方式融合在一起,弥补GPS数据定位精度不够高的缺陷和加速度传感器误差积累的问题,以得到精度比较高的定位信息,退出并交出CPU使用权。地图匹配任务被调用后采用地图匹配算法把定位信息投影到电子地图上,进行标绘,通过对LCD屏的刷新,将定位信息及时提供给用户。应用程序流程如图4所示。
结束语
目前,该系统已经设计完毕,进入最后的测试阶段,经过一段时间的测试,硬件性能和软件性能良好,是一种可行的设计思路。
- 加速度传感器在汽车防盗系统中的应用研究(06-05)
- 双轴加速度传感器在车载电子罗盘应用中的抗干扰设计(07-18)
- 汽车ESP传感器及其接口技术详解(01-18)
- 汽车应用中的磁阻传感器 (02-18)
- 基于AVR的防汽车追尾安全装置设计(03-25)
- 基于AMR磁阻传感器和加速度传感器的电子罗盘(10-04)