基于MSP43O单片机的汽车舒适度评价系统设计
引言
随着经济水平的发展,人们对汽车的需求量越来越大。汽车给我们的出行带来了极大方便的同时,也对驾驶及乘坐人员的健康提出了挑战。汽车车厢是一个相对狭小的空间,其内部环境对于驾驶及乘坐人员(尤其是对长时间驾车的驾驶员)的身体健康的影响不容忽略。
加强对汽车舒适度的研究能为改进汽车舒适度提供理论支持。目前,人们对汽车舒适度评价的研究还是很少,无论是理论还是技术方面都还不成熟。提出一套合理的汽车舒适度评价系统的设计方法,将有利于汽车舒适度的提高,也有利于汽车综合性能的提高。在此基础上我们设计了一个基于MSP430单片机的汽车舒适度评价系统,此系统用MSP430系列单片机为系统的硬件核心,通过三种传感器(温度传感器,湿度传感器,振动传感器)探测相关参数,经过数据融合,用液晶显示器输出结果,显示是否舒适。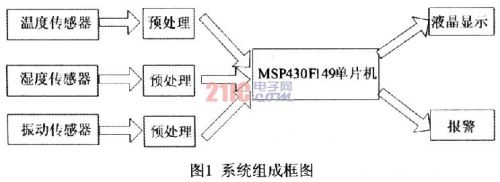
工作原理:要对一辆汽车的内部空间进行舒适度评价,首先要确定评价的参数。我们选用人体最为敏感的温度、湿度和振动程度作为评价参数。系统框图如图1所示,单片机通过相应的驱动电路控制继电器的开闭,用低功耗的MSP430单片机作为硬件核心,选择合适的湿度、温度、振动传感器作为参数测量的传感器。由MSP430的A/D端口导入,对导入的数据进行处理,采用滤波、去噪等手段,再采用相关办法(比如查表法)计算出相应的湿度、温度、振动程度,再对三个参数做出综合评价,并同时送至显示端,给出控制信号,调节相关设备,改善车厢的舒适度,直至舒适为止,并保持,用来完善整套系统,并与整车匹配。
1 硬件设计
1.1 电源及系统复位电路
整个系统采用3.3V供电,考虑到硬件系统要求电源具有稳压功能和纹波小等特点,另外也考虑到硬件的低功耗等特点,因此系统硬件的电源部分采用TI公司的TPS76033芯片实现,该芯片能很好地满足本硬件系统的要求。
复位电路的设计一定要使系统能够在各种复杂情况下稳定可靠地工作。复位性能不好会影响系统的正常运行。在MSP430单片机中有一RST复位管脚,它与不可屏蔽中断功能管脚复用,可由软件选择其功能,正常情况下为复位功能,只要有低电平输入,系统就将复位。复位电路可以采用R-C复位电路,也可以采用以复位芯片实现的复位电路,R-C复位电路具有经济性,但可靠性不高,用复位芯片实现的复位电路具有很高的可靠性,因此为了保证复位电路的可靠性,本系统采用复位芯片实现的复位电路,本系统采甩MAX809芯片。复位电路如图2所示。为了减小电源的干扰,还要在复位芯片的电源输入端加一个0.1 μF的电容来实现滤波,以减小输入端受到的干扰。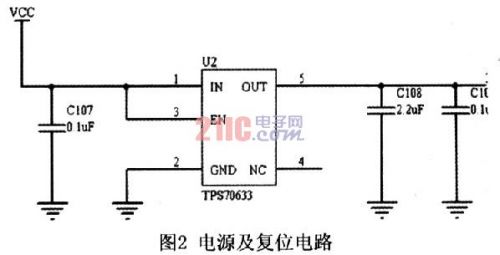
1.2 温度传感器的选择及电路设计
AD7416是美国模拟器件公司(ADI)推出的单片低功耗数字温度传感器,其内部包含带隙温度传感器和10位A/D变换器,可将感应温度以0.25℃的分辨率转换为数字信号。单片机通过ⅡC接口可对内部寄存器进行读写操作,并允许8片AD7416挂在同一串行总线上。该温度传感器可广泛应用于环境温度检测、工业过程控制、家用电器、电池充电、计算机系统等。其功耗极低,在应用于暖气管道温度测量时,采用特定的电源管理模式,以20s采样周期工作,平均功耗仅66(nW),很适合与TI公司MSP430超低功耗单片机构成电池供电的热能计算表,使随机电池工作时间长达5年以上。利用P1.6接10kΩ上拉电阻分别模拟I2C的SCL、SDA,硬件连接图如图3所示。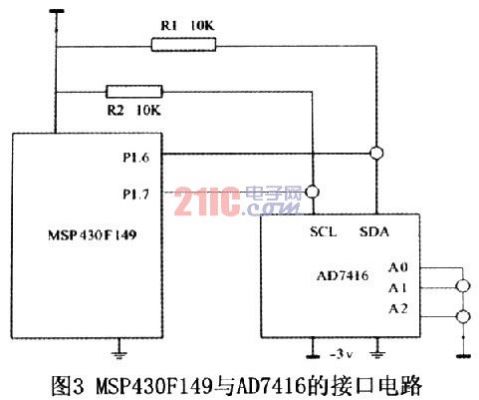
1.3 湿度传感器的选择及电路设计
湿度传感器选用Honeywell公司的集成湿度传感器HTH3610,该传感器采用热固性聚脂电容式传感头,同时在内部集成了信号处理功能电路,因此该传感器可完成将相对湿度值变换成电容值,再将电容值转换成线性电压输出的任务,同时该传感器还具有高精度、快速成响应、稳定性好、低温飘、抗化学腐蚀性能强及互换性好等优点,由于是线性电压输出故可简化外围电路设计。但是该传感器在使用时仍需注意以下两点:a.该传感器在相对湿度由0%~100%变化时其电压输出为0.8V~3.9V,此输出电压值无法满足A/D采集板标准输入电压(0~5V,±5V,O~10V)的需求,故仍需进行电压变换。b.IH3610内部的信号调理电路被修正为Vsupply=5V,25℃时在0%~100%相对湿度范围内输出电压变化范围为0.8~3.9V,但当该湿度传感器工作的温度发生变化时,相同的湿度值,其输出电压值也将不同,因此该传感器在使用时还须进行温度补偿。补偿公式(1)为:
RH=(sensor%RH)/(1.0546-0.02l6T) (1)
由于HIH-3610湿度传感器为线性输出,因此它与MSP430F149的接口电路非常简单。如图4所示。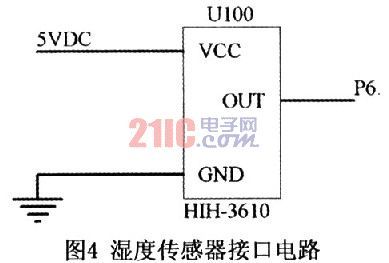
1.4 振动传感
- 车载酒精探测控制仪设计(05-01)
- 基于MSP430行驶车辆检测器的设计(07-16)
- 汽轮机内蒸汽湿度测量控制系统研究(05-17)
- 基于MSP430的车体自动调平系统(11-08)
- 基于短距离无线通讯技术的汽车无线射频识别系统系统设计(01-07)
- 基于MSP430自动往返小车的设计(11-24)