基于智能PWM控制的机车制动控制单元的设计
气缸压力的精确控制。基于模糊推理的PID控制就是运用Fuzzy Sets理论和方法将操作人员或者专家的整定经验和技术知识总结成为Fuzzy规则模型,形成微机的查询表格及解析式,根据系统的实际响应情况,运用模糊推理来实现PID控制。在PID控制算法基础上增加求采样时刻的偏差E和偏差变化率Ec,参数的Fuzzy自校正思想是根据被控对象的响应在采样时刻的E和Ec来确定kP,k1,kD三参数修正的方向和大校其算法过程是利用对应的规则集将控制指标模糊化,然后利用他与知识库中的模糊规则进行匹配,如有规则被匹配,则执行该规则的结果部分,就可以得到相应的参数修正值。其结构图如图2所示。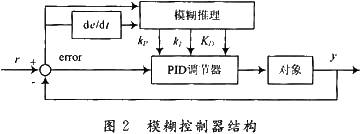
4.2 模糊PID控制器设计
控制系统的PID算法是根据压力目标值与实际值之差的比例值、积分值、微分值来确定控制量的大小。其算式为:
式中,e(t),e(t-1)分别为第t次及第t-1次采样偏差值;pout(t)为第t次的控制量输出值;kP,kI,kD分别为比例系数、积分系数和微分系数。合适的kP,kI,kD参数直接关系到控制的精度。
根据模糊数学的理论和方法,将在现场获得的调试经验和技术知识总结成为IF(条件)、THEN(结果)形式的模糊推理规则,并把这些模糊规则及相关信息(如初始的PID参数)存入计算机。根据检测回路的响应情况,计算出采样时刻的偏差E和变化率Ec,运用模糊推理,进行模糊运算,即可得到该时刻的kP,kI,kD,实现对PID参数的最佳调整。
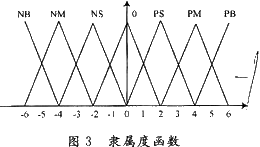
Fuzzy-PID就是根据现场调试得到在PID参数预整定值k′P,k′I,k′D,再利用模糊规则实时在线整定PID控制器的三个修正参数△kP,△kI和△kD,实现对压力的优化控制。模糊控制器的输入、输出变量都是精确量,模糊推理是针对模糊量进行的,因此控制器首先要对输入量进行模糊化处理。在所设计的Fuzzy-PID控制器中,输入、输出变量的语言值均分为7个语言值:{NB,NM,NS,0,PS,PM,PB},他们分别代表负大、负中、负小、零、正小、正中和正大。隶属度函数采用灵敏性强的三角函数,如图3所示。
偏差E的基本论域为[-5 kPa,+5 kPa],偏差变化率Ec的基本论域为[-0.5,+0.5],△kP的基本论域为[-1,1];△kI的基本论域为[-0.002,0.002];△kD的基本论域为[-1,1]。以上各变量的模糊量分别为E,Ec,△kP,△kI和△kD,其论域均为[-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6]。输入量E,Ec的量化因子为:ke=1.2,kec=12。
总结工程设计人员的技术知识和实际操作经验,得到了针对kP,kI,kD三个参数分别整定的模糊控制表,见表2、表3和表4。
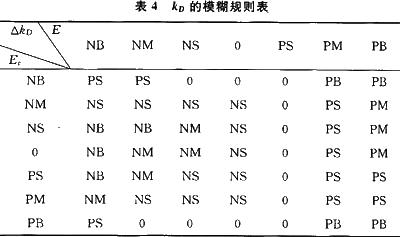
在本系统中,根据偏差E和偏差变化率Ec,取得相应的语言值,根据表1~表3的整定规则表,经过公式法模糊决策,分别得到3个修正参数△kP,△kI,△kD的模糊量,然后△kP,△kI,△kD要进行去模糊化取得精确量,去模糊化有几种方法,一般用重心法比较合适,由公式可得:
其中u为模糊判决后的输出量,uN(xi)为隶属度函数,xi为论域中的元素。
然后由此得到各修正参数:
其中ku为输出量的比例因子:
经过上述过程,可以得到模糊控制器的3个参数:
5 软件实现
在系统控制电路中,单片机选用ATMEL公司的AT89C55,程序选用C51进行编写。本系统主要模块有主程序、T0中断子程序、模糊PID算法子程序等。主程序流程如图4所示,模糊PID算法的程序流程如图5所示。
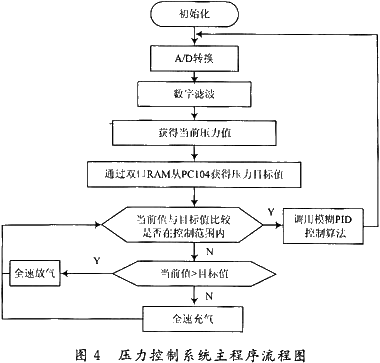
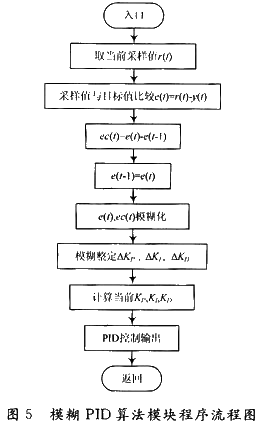
主程序进行一系列的初始化后循环等待中断;T0产生2 ms定时中断,T0中断服务子程序对中断次数计数,每50次中断(100 ms)为一个控制周期,每一个控制周期读入当前气缸压力采样值,调用模糊PID子程序对气缸压力进行精确控制。
6 结 语
基于智能PWM控制的制动控制单元具有以下特点:
(1) 系统充分利用了单片机和PC104的软硬件,系统结构简单、可靠性高、抗干扰能力强。
(2) 系统通过模糊PID算法由单片机产生PWM信号实现对机车制动缸和均衡风缸的压力控制,系统调压范围广,动、静态性能好、控制精度高、自适应能力强。
通过在株洲电力机车厂对制动机的调试表明,基于智能PWM控制的制动控制单元对机车制动机制动缸和均衡风缸的控制精度可达到±0.5 kPa,可以满足电力机车制动控制的需要。
- 基于单片机的疲劳驾驶检测仪设计(08-22)
- 智能大电流功率开关可有效降低汽车电子系统成本(01-09)
- PIC单片机在汽车电动车窗控制器中的应用(06-22)
- 基于9S12DG128的智能车控制系统设计与实现(08-27)
- 汽车尾灯和刹车控制器设计方案(11-20)
- LED汽车前照灯驱动电路设计与仿真(04-19)