汽车山区道路行驶安全预警系统设计研究
sc端接80K的电阻到地,即可设置采样频率为8KHz,最大录音时间为60s;系统在实现预警之前,可先使用录音软件录制好所需的.wav格式音源文件,再将音源文件输入电脑的CoolEdit或Goidwave软件进行编辑,然后将所需要播音的内容通过ISD1700S语音编程拷贝机分段录制到语音芯片中(SPI模式进行多片芯片语音信息的拷贝。
系统软件设计
只有软件和硬件的结合才能更好的完成预警功能。前面已经对系统的硬件电路进行了设计,下面介绍一下预警系统功能的软件部分。
在TMS320LF2407A软件设计过程中,采用汇编指令设定硬件相关的寄存器,编写I/O输入输出程序;采用C语言编写行驶安全预警算法程序。TMS320LF2407A车辆山区行驶安全预警软件结构如图5所示,本系统软件设计分为主控模块、A/D转换模块、I/O模块和预警模块4个模块。主控程序模块控制整个软件的运行。A/D模块将传感器采集的模拟信号转换成数字信号;I/O模块控制TMS320LF2407A与外部的数据输入输出;预警模块得到行驶安全程度值和语音提示信号。下面主要介绍下预警流程。
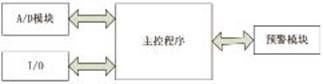
图5 预警系统软件结构图
预警流程
预警系统是当汽车在山区道路行驶时快要发生不安全时进行语音报警。软件结构主要包括系统初始化子程序、SPI初始化程序和中断服务子程序三部分,主程序负责判断是否需要播报语音信息,以及找到该语音信息的存储地址,中断服务子程序负责将接收到的地址放入语音芯片的APC寄存器中进行保存。其实现预警的过程如下。
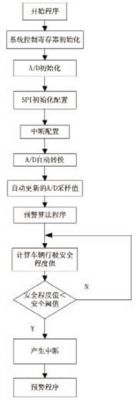
图6 预警流程图
DSP(TMS320LF2407A)A/D接口对采集的信息进行数字化,然后通过预警算法程序得到车辆行驶安全程度值,并给语音芯片ISD1730提供预警信号。预警流程如图6(见下页)。程序开始运行后,首先初始化DSP的控制寄存器SCSR,然后初始化A/D控制寄存器ADCTRL、MAXCONV、CHSELSEQ,接着设置SPI端口参数,再配置中断IMR、IFR。在这之后A/D自动转换开始运行,A/D采样得到的车辆运行工况、道路参数和周围环境条件等值经过山区道路车辆行驶安全度预警算法计算得出当时车辆行驶的安全程度值,然后对模型中的安全阈值进行比较判断,根据预警安全程度的不同执行不同的程序。当安全程度较低时,则DSP执行预警子程序进行语音播报预警。
结束语
本文通过对山区道路行驶安全预警系统的软、硬件设计,最终要实现车辆在山区道路上的安全行驶,在危险将要发生的前几秒时间内提醒驾驶员,了解当时的运行状态,以便更好的做出相应的补救措施。这对减少山区道路交通事故,保障人们财产和人身安全都有着重大的现实意义。
- 基于全桥马达驱动的电动车窗防夹设计(06-13)
- HT46RU24设计的出租车计价器方案(11-21)
- 面向电动车窗/天窗应用的集成嵌入式功率半导体(05-12)
- AVR单片机的天然气发动机电控系统设计(01-20)
- MCU为电动自行车提供有效的驱动(08-07)
- 基于Atmel半导体方案的汽车雨刷系统的实现(08-02)