基于单片机的倒车防撞预警系统设计和实现
时间:11-21
来源:
点击:
3.3 外部中断0服务程序
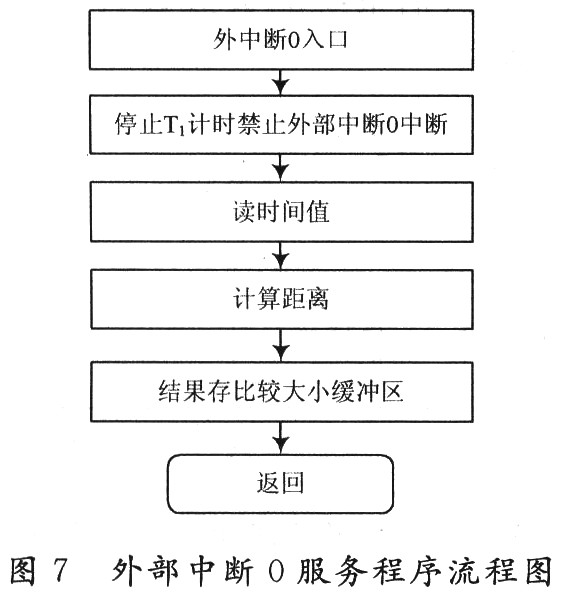
外部中断O服务程序流程图如图7所示。单片机一旦接收到返回超声波信号(即INT0引脚由高电平跳变为低电平),立即进入外部中断0服务程序。首先停止定时器T1计时,禁止外部中断0中断。然后将定时器T1中的数N,也即将超声波往返所用的时间N(单位:μs),按式S=CT/2=(346 x N×10-6)/2=173×N÷10 000计算,即得被测物的距离(单位:cm),将计算结果以百位、十位、个位BCD码方式送入比较大小的缓冲区,以备比较大小使用。然后等待定时器T0定时56 ms中断的产生,继续下一路的探测处理。
超声波发生子程序通过P3.3端口发送16个周期是25μs(即频率40 kHz,1个周期内高电平持续13μs、低电平持续12 μs)的矩形脉冲电压。脉冲串个数在10~20个比较合适。脉冲个数太少,发射强度小,探测距离短;脉冲个数太多,发射持续时间长,在离障碍物距离近时,脉冲串尚未发射完毕,先发射出去的脉冲产生的回波就到达接收端,影响测距结果,造成测距盲区增大。
4 实现应用分析
本系统在实验室条件下进行了可行性的研究设计,要实际应用中就必须考虑测量精度和工作稳定性的问题。因此,本系统可采取几项措施来提高测量精度和工作稳定性。
(1)超声波的传播速度与温度有关。为了适应不同环境温度下的测距需要,提高测量精度,硬件电路上可增加检测车外环境温度的环节。单片机根据实测的温度值,再计算确定超声波的传播速度,即C=331.4+0.6lt。t是环境温度。或者在不增加硬件成本情况下,可考虑通过实验数据分析,找到测量值与实际值偏差特点和规律,通过软件编程对测量数据进行校正处理。
(2)软件设计中采用数字滤波中的算术平均滤波程序对每个测距点进行连续多次测量,取平均值作为该测距点的测量数据,以提高数据采样的可靠性。要尽量减小探测盲区,所设定的延时时间可根据实际所用超声波传感器余振时间而定,可在实际调试中确定最小延时时间。
(3)倒车雷达安装在车上,倒车雷达的工作环境非常恶劣,汽车倒车工作时,高压点火产生很强的电磁辐射,会影响电路正常工作。所以在硬件及软件方面要考虑采取抗干扰措施,提高系统工作的可靠性。如用金属壳屏蔽电路,采用屏蔽线连接超声波传感器;在满足测量距离的情况下,可适当调大超声波电信号放大和整形电路中检波电容C3的容量。硬件上可增加"看门狗"电路,软件设计添加指令冗余、软件陷阱、或设置软件"看门狗",防止程序"跑飞"或者进入死循环。对于驾驶员来说,倒车时主要关心的是车后方有无障碍物、以及障碍物离车大约有多远等问题。由于车子制动时存在惯性,倒车遇到障碍物时,驾驶员总要提前制动。考虑性价比,倒车雷达测量精度不必很高。但从倒车安全考虑,此时的测量显示值宁大勿小。
5 结 语
本系统充分利用了单片机的内部资源,用软件编程产生超声波矩形脉冲,代替硬件的超声波发生电路,节省了硬件成本。采用一块集成器件实现超声波接收放大和整形,避免了采用多级集成运放组成高增益放大电路易产生自激等问题。实验表明设计可行。在不增加硬件成本时,通过完善软件设计,可提高系统测量精度和工作的可靠性,能够满足使用要求。在考虑功能扩展时,可以采用带"看门狗"的AT89S52单片机,以增加扩展端口。在超声波测距的基础上,如可增加防盗报警功能、车载蓄电池电压检测功能等,若增加微型摄像头和小型液晶显示器,便成为可直接观察车后方的可视倒车雷达。本系统实用性强,性价比高。 (编辑:chiying)
外部中断O服务程序流程图如图7所示。单片机一旦接收到返回超声波信号(即INT0引脚由高电平跳变为低电平),立即进入外部中断0服务程序。首先停止定时器T1计时,禁止外部中断0中断。然后将定时器T1中的数N,也即将超声波往返所用的时间N(单位:μs),按式S=CT/2=(346 x N×10-6)/2=173×N÷10 000计算,即得被测物的距离(单位:cm),将计算结果以百位、十位、个位BCD码方式送入比较大小的缓冲区,以备比较大小使用。然后等待定时器T0定时56 ms中断的产生,继续下一路的探测处理。
超声波发生子程序通过P3.3端口发送16个周期是25μs(即频率40 kHz,1个周期内高电平持续13μs、低电平持续12 μs)的矩形脉冲电压。脉冲串个数在10~20个比较合适。脉冲个数太少,发射强度小,探测距离短;脉冲个数太多,发射持续时间长,在离障碍物距离近时,脉冲串尚未发射完毕,先发射出去的脉冲产生的回波就到达接收端,影响测距结果,造成测距盲区增大。
4 实现应用分析
本系统在实验室条件下进行了可行性的研究设计,要实际应用中就必须考虑测量精度和工作稳定性的问题。因此,本系统可采取几项措施来提高测量精度和工作稳定性。
(1)超声波的传播速度与温度有关。为了适应不同环境温度下的测距需要,提高测量精度,硬件电路上可增加检测车外环境温度的环节。单片机根据实测的温度值,再计算确定超声波的传播速度,即C=331.4+0.6lt。t是环境温度。或者在不增加硬件成本情况下,可考虑通过实验数据分析,找到测量值与实际值偏差特点和规律,通过软件编程对测量数据进行校正处理。
(2)软件设计中采用数字滤波中的算术平均滤波程序对每个测距点进行连续多次测量,取平均值作为该测距点的测量数据,以提高数据采样的可靠性。要尽量减小探测盲区,所设定的延时时间可根据实际所用超声波传感器余振时间而定,可在实际调试中确定最小延时时间。
(3)倒车雷达安装在车上,倒车雷达的工作环境非常恶劣,汽车倒车工作时,高压点火产生很强的电磁辐射,会影响电路正常工作。所以在硬件及软件方面要考虑采取抗干扰措施,提高系统工作的可靠性。如用金属壳屏蔽电路,采用屏蔽线连接超声波传感器;在满足测量距离的情况下,可适当调大超声波电信号放大和整形电路中检波电容C3的容量。硬件上可增加"看门狗"电路,软件设计添加指令冗余、软件陷阱、或设置软件"看门狗",防止程序"跑飞"或者进入死循环。对于驾驶员来说,倒车时主要关心的是车后方有无障碍物、以及障碍物离车大约有多远等问题。由于车子制动时存在惯性,倒车遇到障碍物时,驾驶员总要提前制动。考虑性价比,倒车雷达测量精度不必很高。但从倒车安全考虑,此时的测量显示值宁大勿小。
5 结 语
本系统充分利用了单片机的内部资源,用软件编程产生超声波矩形脉冲,代替硬件的超声波发生电路,节省了硬件成本。采用一块集成器件实现超声波接收放大和整形,避免了采用多级集成运放组成高增益放大电路易产生自激等问题。实验表明设计可行。在不增加硬件成本时,通过完善软件设计,可提高系统测量精度和工作的可靠性,能够满足使用要求。在考虑功能扩展时,可以采用带"看门狗"的AT89S52单片机,以增加扩展端口。在超声波测距的基础上,如可增加防盗报警功能、车载蓄电池电压检测功能等,若增加微型摄像头和小型液晶显示器,便成为可直接观察车后方的可视倒车雷达。本系统实用性强,性价比高。 (编辑:chiying)
- 倒车雷达主控芯片GM3101的功能特性分析(01-24)
- 微控制器和超声波在倒车系统中的应用(03-19)
- 专家解答网友提问 如何选购倒车雷达(06-08)
- 汽车倒车雷达系统的设计与实现(06-13)
- 基于温度补偿的超声波倒车测距仪的研制(08-21)
- 汽车倒车障碍检测系统解决方案(04-10)