基于μC/OS-Ⅱ系统的智能寻迹模型车的设计与实现
时间:11-02
来源:作者:刘红蕾 张键洋 郝宁 周立超 许雪梅
点击:

路径黑线的识别的准确程度决定智能车能否完成快速、稳定的寻线。识别装置由高发射功率红外光电二极管和高灵敏度光电晶体管组成,以非接触检测方式,检测距离可调整达4~20 mm。为了精确测定智能车的相对位置,将7对ST178并排安放在车底盘下部的前端,其分布垂直于智能车行走的方向。当车行走时,保持7个发光管发光,当某一个光电对管的下方为黑色轨迹时,相应的接收管输出为高电平,而下方为白色路面的接收管输出为低电平。再经数据处理后,控制系统就可以分析出当前车行走的位置,从而达到调整智能车运行状态的目的。例如,假设路面黑线的宽度为三组红外线对管的宽度,当黑线在车体中间时,7个输入引脚为 28H(0011100);当车体左或右偏时,接收到的数据会改变,即"1"会相应的左移或右移,如0001110(右偏)、0111000(左偏),偏移幅度不同,"1"的移动位数便不同。
2.2 转向控制模块
采用PWM(脉冲宽度调制)控制,配用L298驱动电路实现直流电机的调速,方法简单且调速范围大,它利用的是直流斩波原理,假定高电平导通,在一个周期T内导通时间为t,那么一个周期T内的平均电压U=(t/T)VCC=qVCC,其中占空比q=t/T。
电机的转速与电机两端的电压成正比,而电机两端的电压与控制波形的占空比成正比,因此电机的速度与占空比成正比,占空比越大,电机转的越快,当占空比q=1时,电机转速达到最大。该智能车系统采用8 MHz的晶体振荡器,PWM信号引脚OCRO/2的频率为:

t/T=(OCR0/1/256)
2.3 车速及路程测量模块
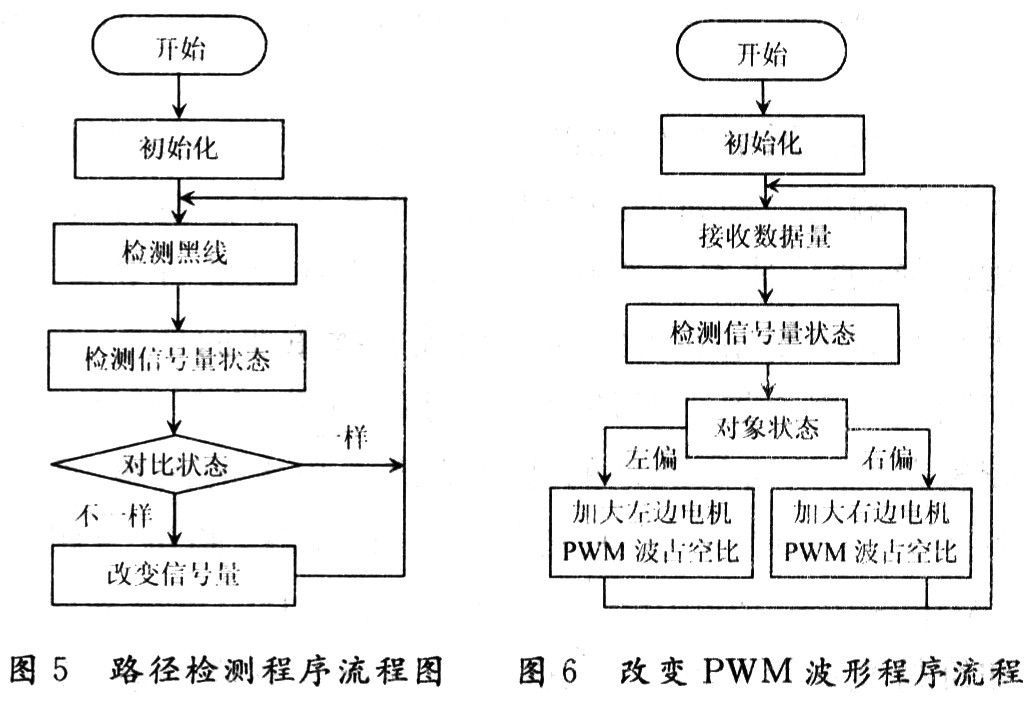
在智能车车后轮上粘贴均匀分布有黑白条纹。在轮转动的过程中,红外传感器会不断检测到黑、白条纹的出现。当红外传感器检测到的为黑条纹时,输入电压为高电平,当检测到的为白条纹时输入电压为低电平。若传感器检测到电平跳变,则计数变量加1。时钟每秒产生一次中断,Task_Clock()进程通过邮箱向 Task Speed_Calculate()进程发送数据,由此可算出小车速度:速度=数据/每圈条纹数。如图5,图6所示。
本文介绍了一种智能寻迹模型车的设计与实现。实践证明,该智能车定位准确,系统响应快且稳定,具备良好的动力性能和精确的转向性能,证明了μC/OS-Ⅱ系统的有效性和稳定性。相比同类智能车,该模型车还具有高性能、低功耗的优点。(编辑:chiying)
- 基于C8051F040的模型车无线控制系统的设计(01-31)