CAN总线混合动力汽车电控系统的设计与实现
时间:08-29
来源:作者:崔刚 阎立江 曲峰
点击:
6)显示单元
显示单元的构成与其他单元大同小异,它的功能是接收CAN总线上的信息,对必要的信息如车速、发动机转速、里程、电池容量、充电电流、放电电流、水温、油量及系统故障代码进行显示,在显示方式上,采用无可动部件的高精度数字显示,增加了显示信息量并提高了可靠性,同时为了满足司机习惯于看指针式模拟仪表的要求,也采用类似指针运动的发光二极管模拟旧式表的显示。
硬件设计
从 N3、N4、N6三节点的功能要求来看,若按功能对硬件进行分别设计可各取所需,减小节点体积和重量,但是,这样不便于系统功能的扩展,也限制了节点的可靠性和互换性,故采取三节点硬件统一设计的方案,即三节点的硬件完全一样,各节点的硬件可互换,每个硬件包括所有三节点所需要的硬件功能,另外,由于现代电子技术的进步,统一设计和分别设计的硬件之间的体积和重量的差别很小,对系统性能的影响可以说是微乎其微,更重要的是这样的设计为后续进一步改进所需的系统扩展和冗余式可靠性设计奠定了硬件基础。
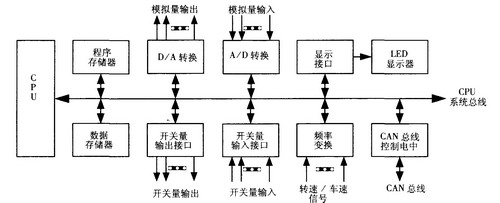
硬件系统(图3)以微处理器CPU为核心以及必要的外围电路构成.其中CPU为高性中央处理单元,具有丰富的功能和高速的处理能力,可快速进行大量的数学和逻辑运算,完全能满足本电控系统的设计要求.程序存储器中存放着实现各节点功能的软件用以控制各节点的功能实现。数据储存器电路用于系统内存扩展,复杂的程序控制和运算需要大量的中间变量和缓冲区,内存的扩展解决了这一问题.D/A转换电路用于将处理后的数字信号转换模拟信号输出,主要应用于输出控制和信号的远程转换,A/D转换电路用于对系统的模拟量进行采集,即将被采集的模拟信号转换为数字信号,所设计的转换电路的转换速度可达5微秒/路,分辨率为1/4096,每个节点可同时进行8路A/D转换,完全可满足任务书的技术要求.开关量输出接口用于输出节点的位控制命令,具有灵活的输出控制,可直接或间接满足各种功率输出的控制要求,在本系统中的主要位控制信号有发动机的供油、空调、大小电机启动选择等信号。
开关量输入电路用于采集系统的开关量,如:钥匙开关信息、离合器状态信息及空调状态信息等信号.显示接口电路用于将被显示信号实时传送到显示器,显示器采用数字化高亮度的LED显示,提高了显示的精度,同时又保留了原有仪表的模式,以便使用者有一个过渡的过程,不致产生不习惯的感觉.频率变换电路用于将系统的速度信号(发动机转速和车速)转换为统一制式的脉冲信号以便微处理器进行识别和测速。CAN总线电路由总线控制器和收发控制电路构成,它负责接收和发送总线信息,使各节点通过总线相连接,使电控系统成为灵活的网络控制系统。
软件设计
前舱传感器节点(N3)的软件设计
N3 节点所要完成的任务为:1)实时检测车速、转速、节气门、水温、真空度的参数值;2)检测本节点故障;3)按通信协议完成总线数据传输.本节点的多数任务要求有很高的实时性,因此本节点的软件策略为:1)对车速、转速及总线通讯采用中断方式处理;2)定时启动A/D转换,为满足任务要求的实时性,定时间隔为20μs,用以及时对节气门、水温、真空度的数字化测量;3)空闲时间查询系统状态,以检测系统是否正常,若有故障,对故障进行相应的处理。这样,即可以实时处理车速、转速和通讯中断又可使CPU处于多任务状态,提高了系统资源的利用率。
室内传感器节点(N4)的软件设计
N4 节点所要完成的任务为:1)实时检测钥匙开关状态、离合器状态、空调状态及刹车的参数值;2)检测本节点故障;3)按通信协议完成总线数据传输.本节点的软件策略为:1)对钥匙开关状态、离合器状态、空调状态等开关量的检测及总线通讯采用中断方式处理;2)定时启动A/D转换,为满足任务要求的实时性,定时间隔为20μs,用以及时对刹车信号的数字化测量;3)空闲时间查询系统状态,以检测系统是否正常,若有故障,对故障进行相应的处理。
显示节点(N6)的软件设计
N6 节点所要完成的任务为:1)对车速、里程、充电电流、放电电流及电池容量等参数进行实时显示;2)及时完成大小电机的启动控制和发动机的供油控制;3)检测本节点故障;4)按通信协议完成总线数据传输。本节点的软件策略为:1)对总线通讯、大小电机的启动控制和发动机的供油控制采用中断方式处理,以保证控制、通讯的及时性;2)定时刷新显示,为满足实时性,定时刷新时间间隔为20ms;3)空闲时间查询系统状态,以检测系统是否正常,若有故障,对故障进行相应的处理。
通信机制设计
本车各单元之间大量数据传送通过CAN总线来完成,这也是本混合动力电控系统的一个与众不同的特色,由于CAN总线的使用,减轻了电控系统的线束重量,降低了系统的复杂性。另外,由于CAN总线是差分传输的一种抗干扰能力很强的现场总线,从而保证了系统通信的可靠性。
显示单元的构成与其他单元大同小异,它的功能是接收CAN总线上的信息,对必要的信息如车速、发动机转速、里程、电池容量、充电电流、放电电流、水温、油量及系统故障代码进行显示,在显示方式上,采用无可动部件的高精度数字显示,增加了显示信息量并提高了可靠性,同时为了满足司机习惯于看指针式模拟仪表的要求,也采用类似指针运动的发光二极管模拟旧式表的显示。
硬件设计
从 N3、N4、N6三节点的功能要求来看,若按功能对硬件进行分别设计可各取所需,减小节点体积和重量,但是,这样不便于系统功能的扩展,也限制了节点的可靠性和互换性,故采取三节点硬件统一设计的方案,即三节点的硬件完全一样,各节点的硬件可互换,每个硬件包括所有三节点所需要的硬件功能,另外,由于现代电子技术的进步,统一设计和分别设计的硬件之间的体积和重量的差别很小,对系统性能的影响可以说是微乎其微,更重要的是这样的设计为后续进一步改进所需的系统扩展和冗余式可靠性设计奠定了硬件基础。
硬件系统(图3)以微处理器CPU为核心以及必要的外围电路构成.其中CPU为高性中央处理单元,具有丰富的功能和高速的处理能力,可快速进行大量的数学和逻辑运算,完全能满足本电控系统的设计要求.程序存储器中存放着实现各节点功能的软件用以控制各节点的功能实现。数据储存器电路用于系统内存扩展,复杂的程序控制和运算需要大量的中间变量和缓冲区,内存的扩展解决了这一问题.D/A转换电路用于将处理后的数字信号转换模拟信号输出,主要应用于输出控制和信号的远程转换,A/D转换电路用于对系统的模拟量进行采集,即将被采集的模拟信号转换为数字信号,所设计的转换电路的转换速度可达5微秒/路,分辨率为1/4096,每个节点可同时进行8路A/D转换,完全可满足任务书的技术要求.开关量输出接口用于输出节点的位控制命令,具有灵活的输出控制,可直接或间接满足各种功率输出的控制要求,在本系统中的主要位控制信号有发动机的供油、空调、大小电机启动选择等信号。
开关量输入电路用于采集系统的开关量,如:钥匙开关信息、离合器状态信息及空调状态信息等信号.显示接口电路用于将被显示信号实时传送到显示器,显示器采用数字化高亮度的LED显示,提高了显示的精度,同时又保留了原有仪表的模式,以便使用者有一个过渡的过程,不致产生不习惯的感觉.频率变换电路用于将系统的速度信号(发动机转速和车速)转换为统一制式的脉冲信号以便微处理器进行识别和测速。CAN总线电路由总线控制器和收发控制电路构成,它负责接收和发送总线信息,使各节点通过总线相连接,使电控系统成为灵活的网络控制系统。
软件设计
前舱传感器节点(N3)的软件设计
N3 节点所要完成的任务为:1)实时检测车速、转速、节气门、水温、真空度的参数值;2)检测本节点故障;3)按通信协议完成总线数据传输.本节点的多数任务要求有很高的实时性,因此本节点的软件策略为:1)对车速、转速及总线通讯采用中断方式处理;2)定时启动A/D转换,为满足任务要求的实时性,定时间隔为20μs,用以及时对节气门、水温、真空度的数字化测量;3)空闲时间查询系统状态,以检测系统是否正常,若有故障,对故障进行相应的处理。这样,即可以实时处理车速、转速和通讯中断又可使CPU处于多任务状态,提高了系统资源的利用率。
室内传感器节点(N4)的软件设计
N4 节点所要完成的任务为:1)实时检测钥匙开关状态、离合器状态、空调状态及刹车的参数值;2)检测本节点故障;3)按通信协议完成总线数据传输.本节点的软件策略为:1)对钥匙开关状态、离合器状态、空调状态等开关量的检测及总线通讯采用中断方式处理;2)定时启动A/D转换,为满足任务要求的实时性,定时间隔为20μs,用以及时对刹车信号的数字化测量;3)空闲时间查询系统状态,以检测系统是否正常,若有故障,对故障进行相应的处理。
显示节点(N6)的软件设计
N6 节点所要完成的任务为:1)对车速、里程、充电电流、放电电流及电池容量等参数进行实时显示;2)及时完成大小电机的启动控制和发动机的供油控制;3)检测本节点故障;4)按通信协议完成总线数据传输。本节点的软件策略为:1)对总线通讯、大小电机的启动控制和发动机的供油控制采用中断方式处理,以保证控制、通讯的及时性;2)定时刷新显示,为满足实时性,定时刷新时间间隔为20ms;3)空闲时间查询系统状态,以检测系统是否正常,若有故障,对故障进行相应的处理。
通信机制设计
本车各单元之间大量数据传送通过CAN总线来完成,这也是本混合动力电控系统的一个与众不同的特色,由于CAN总线的使用,减轻了电控系统的线束重量,降低了系统的复杂性。另外,由于CAN总线是差分传输的一种抗干扰能力很强的现场总线,从而保证了系统通信的可靠性。
- 现代电动车辆中电控技术应用(03-01)
- 利用CAN总线的进行汽车轮速传感器系统设计(09-22)
- CAN总线在CFA6470混合动力汽车中的应用(09-25)
- 基于CAN总线的汽车发动机智能电子控制器研究(10-20)
- 基于CAN总线的电动汽车控制系统设计(05-25)
- 基于CAN/GSM的车辆监控系统设计(07-15)