基于ARM的车载导航系统的研究与设计
时间:08-09
来源:作者:王晓宁 王振臣 姚帆
点击:
0 引 言
在当今社会,汽车成为城市主要的交通工具之一,也越来越成为人们生活中不可缺少的一部分。实现对汽车更加准确的导航和定位,将使外出旅行变得更加快捷方便,同时对改善我国的交通状况也具有重要意义。
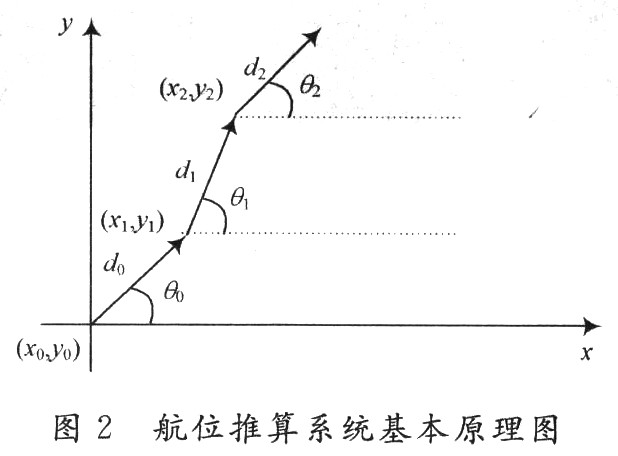
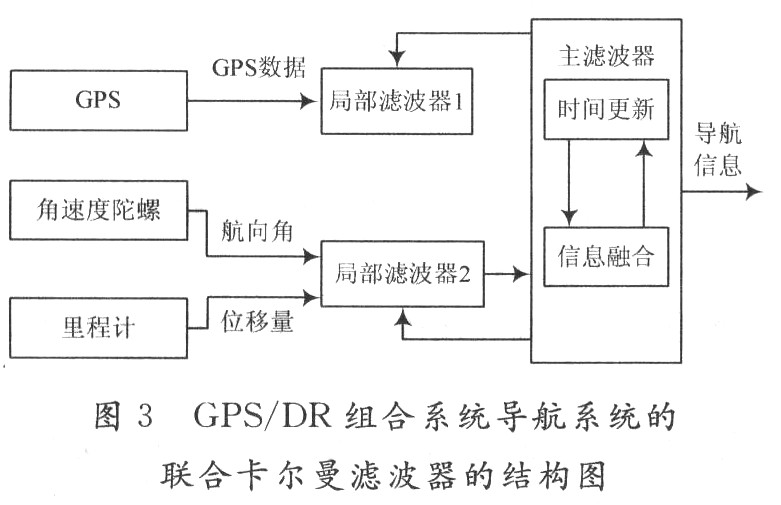
目前,国内由于GPS存在着导航卫星信号容易受到外部干扰或屏蔽的问题。例如,当车辆行驶在城市高楼区、地下隧道内、立交桥下时,由于卫星信号受到遮挡而容易暂时"丢失",而使GPS接收机无法给出定位解或定位精度很差。DR系统可以实现连续自主的导航定位,抗干扰性强,但是DR方向传感器误差较大,且随时间积累,无法长期使用。针对这些情况,本文给出一种利用嵌入式微处理器S3C44B0x开发板作为中央处理单元,利用GPS模块提供位置数据和DR模块的航位推算,经过联合卡尔曼滤波,最终通过信息融合和地图匹配,在彩色LCD(LFUBK909A)模块上显示出来。
1 系统硬件设计
1.1 系统硬件组成
基于ARM的GPS/DR导航系统原理如图1所示,系统主要包括ARM微控制器、GPS系统、航位推算(DR)系统、数据处理单元、显示LCD单元。其中,DR系统所用的主要硬件包括航向传感器以及距离(速率)传感器。
(1)定位精度:定位精度小于15 m(无SA时);
(2)跟踪能力:同时跟踪12颗卫星;
(3)操作环境:工作温度范围是-40~+85℃;
(4)单一+5 V供电,有两个半双工的串口;串口1用于输出定位结果和接收对其进行初始化的写入,串口2用于接收差分信息
1.2.2 信息融合
1.3 LCD子系统设计
车载系统的显示装置采用了320×240点阵式5.2英寸彩色液晶显示屏 (LFUBK909A),因为S3C44B0内嵌LCD控制器(支持320×240显示屏),无需外接LCD显示控制器,简化了设计。内嵌的LCD控制器采用DMA方式将显示缓存中的图像数据传输到外部LCD驱动电路,支持单色,4级灰度和16级灰度模式以及256级彩色的LCD。图4是S3C4480与 LFUBK909A的接口。
2 软件设计
该导航系统的软件开发是在ADS 1.2开发环境下完成的。软件主要采用C语言编写,在整体编译调试通过和运行正常后,使用ADS 1.2开发环境中的片上调试功能,将源程序烧录到FLASH,这样将JTAG和电源断开重新上电后,程序就可以脱机运行了。图5是主线程的软件流程图。
3 结 语
基于ARM7采用GPS/DR组合导航系统来克服单独采用GPS信号易丢失和航位推算DR的缺点,通过数据滤波处理和信息融合算法,使得定位误差远远小于单独GPS系统,同时也弥补了DR系统误差发散的特点,最终在彩色LCD(LFUBK909A)上显示出来。实验结果证明了该组合是行之有效的。
在当今社会,汽车成为城市主要的交通工具之一,也越来越成为人们生活中不可缺少的一部分。实现对汽车更加准确的导航和定位,将使外出旅行变得更加快捷方便,同时对改善我国的交通状况也具有重要意义。
目前,国内由于GPS存在着导航卫星信号容易受到外部干扰或屏蔽的问题。例如,当车辆行驶在城市高楼区、地下隧道内、立交桥下时,由于卫星信号受到遮挡而容易暂时"丢失",而使GPS接收机无法给出定位解或定位精度很差。DR系统可以实现连续自主的导航定位,抗干扰性强,但是DR方向传感器误差较大,且随时间积累,无法长期使用。针对这些情况,本文给出一种利用嵌入式微处理器S3C44B0x开发板作为中央处理单元,利用GPS模块提供位置数据和DR模块的航位推算,经过联合卡尔曼滤波,最终通过信息融合和地图匹配,在彩色LCD(LFUBK909A)模块上显示出来。
1 系统硬件设计
1.1 系统硬件组成
基于ARM的GPS/DR导航系统原理如图1所示,系统主要包括ARM微控制器、GPS系统、航位推算(DR)系统、数据处理单元、显示LCD单元。其中,DR系统所用的主要硬件包括航向传感器以及距离(速率)传感器。

(1)定位精度:定位精度小于15 m(无SA时);
(2)跟踪能力:同时跟踪12颗卫星;
(3)操作环境:工作温度范围是-40~+85℃;
(4)单一+5 V供电,有两个半双工的串口;串口1用于输出定位结果和接收对其进行初始化的写入,串口2用于接收差分信息
1.2.2 信息融合
1.3 LCD子系统设计
车载系统的显示装置采用了320×240点阵式5.2英寸彩色液晶显示屏 (LFUBK909A),因为S3C44B0内嵌LCD控制器(支持320×240显示屏),无需外接LCD显示控制器,简化了设计。内嵌的LCD控制器采用DMA方式将显示缓存中的图像数据传输到外部LCD驱动电路,支持单色,4级灰度和16级灰度模式以及256级彩色的LCD。图4是S3C4480与 LFUBK909A的接口。
2 软件设计
该导航系统的软件开发是在ADS 1.2开发环境下完成的。软件主要采用C语言编写,在整体编译调试通过和运行正常后,使用ADS 1.2开发环境中的片上调试功能,将源程序烧录到FLASH,这样将JTAG和电源断开重新上电后,程序就可以脱机运行了。图5是主线程的软件流程图。


3 结 语
基于ARM7采用GPS/DR组合导航系统来克服单独采用GPS信号易丢失和航位推算DR的缺点,通过数据滤波处理和信息融合算法,使得定位误差远远小于单独GPS系统,同时也弥补了DR系统误差发散的特点,最终在彩色LCD(LFUBK909A)上显示出来。实验结果证明了该组合是行之有效的。
- 采用ARM7网络型汽车防盗系统的设计方案(02-26)
- ADXL202在组合车载导航系统中的应用(09-15)
- 基于GSM的GPS车辆定位监控系统(上)(11-30)
- 基于GSM的GPS车辆定位监控系统(下)(11-30)
- 另类传感器观念:汽车传感器(3)(11-30)
- 基于GPRS网络的GPS图形导航仪(上)(01-08)