基于OSEKturbo实时操作系统的ABS设计
时间:07-09
来源:作者:洪艳伟 赖娟
点击:
0 引言
作为智能交通的主要组成部分,车载导航定位己成为最近的研究热点[1]。随着全球定位系统(GPS)从军用转为民用后,GPS技术应用于移动目标的监控有着其它无法比拟的优势,所以采用GPS技术对各种车辆实施监控、调度管理成为一个新的研究热点。
GPRS可以实现数据的实时交换,而且按照数据流量计费,特别适合应用在车辆卫星定位系统这种频繁的小流量数据传输的场合。因此,本系统采用GPRS作为车载电脑与服务器的通信方式。
由于地图匹配采用了复杂的算法,道路网络的拓扑结构须采用数据库方式,整个定位系统须采用高级语言编程实现。基于这些特点该车载定位装置采用单板工控电脑作为硬件平台,操作系统采用Windows XP Embedded with SP2 。相对于Linux, Windows CE等其他嵌入式操作系统,选择嵌入式XP的好处是,用户方的现有程序不必重新编程,而研制方的编程人员对基于Windows的编程己经比较熟悉,不必学习新的操作系统下如何编程。
随着网络技术的发展和人们对车辆定位的需求,急需利用Internet实现对指定的车辆查询定位,使用户可以直接通过访问车辆导航定位公司的网站即可以文本和图像的形式显示给用户。Web GIS是在Internet环境下运行的GIS,就是利用互联网技术和WWW技术来完善和扩展传统的GIS功能的一门新技术。因此,如何利用Web GIS技术结合GPS技术实现在Internet环境下车辆定位查询是一个很值得探讨的问题并具有现实意义。
1系统的总体架构
1.1系统的组成
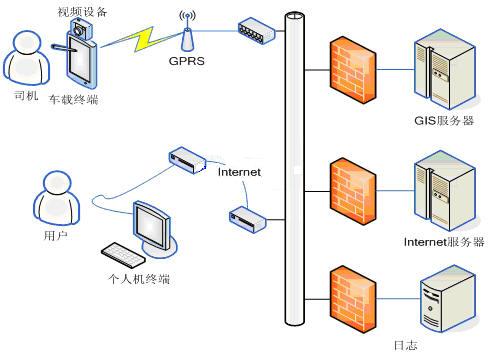
在车辆定位中该应用系统主要包括如下4部分:车载GPS移动终端, GPRS通信网络、车辆服务信息中心和用户,如图1所示。
1. 2工作原理
其中车载GPS移动终端可以为服务中心提供移动目标的最新定位数据、车辆运行速度和方向等信息,并将该信息通过无线通信网络GPRS传到车辆服务信息中心,车辆服务信息中心通过无线通信网络GPRS与车载GPS移动单元通信,通过Internet与客户通话。当客户端提交车辆定位请求后,车辆服务信息中心接收该请求并通过无线通信网络GPRS向车载移动单元发出定位指令,然后将该车辆的最新信息传回车辆服务信息中心,服务信息中心接收新的车辆信息并在地图上绘制,然后以文本和图片组成的网页传回客户端。
2 车载电脑终端硬件平台构建
该车载电脑终端硬件平台采用AAEON公司的 GENE-8310开发板作为平台,该开发板实际就是一个嵌入式的电脑处理平台。板载 Intel® Celeron® M 600MHz处理器,具有强劲的处理能力。具有良好的显示支持,丰富的接口。对于客户在低功耗控制下的优秀处理能力等更高需求方面都是最好的选择。特别是因为它基于Intel平台,在普通电脑上开发的软件可以不用修改就可以在该平台运行。简化了编程工作量。在该开发板的基础上扩充GPS和GPRS模块,构成车载电脑终端的硬件系统。
3 车载操作系统的开发及构建[2]
该车载电脑终端软件平台以Windows XP Embedded with SP2作为操作系统。Windows XP Embedded是桌面 Windows XP操作系统的组件化版本,它能够快速开发出最为可靠的全功能连接设备。Windows XP Embedded采用与Windows XP Professional相同的二进制代码,从而使得嵌入式开发人员能够只选择那些小覆盖范围嵌入式设备所需的丰富定制化特性。该系统中我们选用了512M的CF卡作为车载操作系统和应用软件的载体,操作系统控制在100M以内。
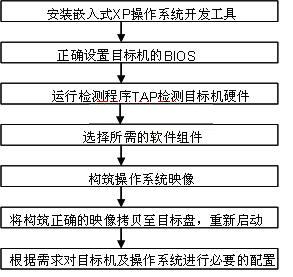
具体的嵌入式XP操作系统的开发,大致可分为几个步骤,如图2所示。鉴于篇幅,在此就不作详细介绍了。
4 GPS数据接收及优化处理
GPS接收模块采用飞鹰公司的TFAG30,车载GPS移动单元传回的定位信息为 NMEA0813标准格式的数据,其中$GPGGA(字头标识符),hhmmss. ss(时间,时、分、秒),bbbb, bbbb(纬度,度度分分,分分分分),N(北纬,s指南纬),IIII ,IIII(经度,度度度分分,分分分分),E(东经,w西经),q (1表示定位模式GPS , 2表示DGPS),nn(卫星数),P(水平位置定位精度因子),h, h(海平面的天线高),m.,g.g(椭球面上的天线高),m,xxx(为DGPS有效数据期),aaaa (DGPS基准站的编号),ss(校验和),< CR>回车<LF>换行
由于接收到的卫星数据存在星历误差,电离层误差,对流层误差以及随机噪声等,为了提高定位的精度,需要对卫星定位数据作差分算法的处理[4]。
为了消除随机噪声和动态噪声对定位结果的影响,在数据处理之前先要对定位数据进行滤波平滑。下面给出所采用的卡尔曼滤波方法的说明。
(1)动态方程
作为智能交通的主要组成部分,车载导航定位己成为最近的研究热点[1]。随着全球定位系统(GPS)从军用转为民用后,GPS技术应用于移动目标的监控有着其它无法比拟的优势,所以采用GPS技术对各种车辆实施监控、调度管理成为一个新的研究热点。
GPRS可以实现数据的实时交换,而且按照数据流量计费,特别适合应用在车辆卫星定位系统这种频繁的小流量数据传输的场合。因此,本系统采用GPRS作为车载电脑与服务器的通信方式。
由于地图匹配采用了复杂的算法,道路网络的拓扑结构须采用数据库方式,整个定位系统须采用高级语言编程实现。基于这些特点该车载定位装置采用单板工控电脑作为硬件平台,操作系统采用Windows XP Embedded with SP2 。相对于Linux, Windows CE等其他嵌入式操作系统,选择嵌入式XP的好处是,用户方的现有程序不必重新编程,而研制方的编程人员对基于Windows的编程己经比较熟悉,不必学习新的操作系统下如何编程。
随着网络技术的发展和人们对车辆定位的需求,急需利用Internet实现对指定的车辆查询定位,使用户可以直接通过访问车辆导航定位公司的网站即可以文本和图像的形式显示给用户。Web GIS是在Internet环境下运行的GIS,就是利用互联网技术和WWW技术来完善和扩展传统的GIS功能的一门新技术。因此,如何利用Web GIS技术结合GPS技术实现在Internet环境下车辆定位查询是一个很值得探讨的问题并具有现实意义。
1系统的总体架构
1.1系统的组成
在车辆定位中该应用系统主要包括如下4部分:车载GPS移动终端, GPRS通信网络、车辆服务信息中心和用户,如图1所示。
1. 2工作原理
其中车载GPS移动终端可以为服务中心提供移动目标的最新定位数据、车辆运行速度和方向等信息,并将该信息通过无线通信网络GPRS传到车辆服务信息中心,车辆服务信息中心通过无线通信网络GPRS与车载GPS移动单元通信,通过Internet与客户通话。当客户端提交车辆定位请求后,车辆服务信息中心接收该请求并通过无线通信网络GPRS向车载移动单元发出定位指令,然后将该车辆的最新信息传回车辆服务信息中心,服务信息中心接收新的车辆信息并在地图上绘制,然后以文本和图片组成的网页传回客户端。
2 车载电脑终端硬件平台构建
该车载电脑终端硬件平台采用AAEON公司的 GENE-8310开发板作为平台,该开发板实际就是一个嵌入式的电脑处理平台。板载 Intel® Celeron® M 600MHz处理器,具有强劲的处理能力。具有良好的显示支持,丰富的接口。对于客户在低功耗控制下的优秀处理能力等更高需求方面都是最好的选择。特别是因为它基于Intel平台,在普通电脑上开发的软件可以不用修改就可以在该平台运行。简化了编程工作量。在该开发板的基础上扩充GPS和GPRS模块,构成车载电脑终端的硬件系统。
3 车载操作系统的开发及构建[2]
该车载电脑终端软件平台以Windows XP Embedded with SP2作为操作系统。Windows XP Embedded是桌面 Windows XP操作系统的组件化版本,它能够快速开发出最为可靠的全功能连接设备。Windows XP Embedded采用与Windows XP Professional相同的二进制代码,从而使得嵌入式开发人员能够只选择那些小覆盖范围嵌入式设备所需的丰富定制化特性。该系统中我们选用了512M的CF卡作为车载操作系统和应用软件的载体,操作系统控制在100M以内。
具体的嵌入式XP操作系统的开发,大致可分为几个步骤,如图2所示。鉴于篇幅,在此就不作详细介绍了。
4 GPS数据接收及优化处理
GPS接收模块采用飞鹰公司的TFAG30,车载GPS移动单元传回的定位信息为 NMEA0813标准格式的数据,其中$GPGGA(字头标识符),hhmmss. ss(时间,时、分、秒),bbbb, bbbb(纬度,度度分分,分分分分),N(北纬,s指南纬),IIII ,IIII(经度,度度度分分,分分分分),E(东经,w西经),q (1表示定位模式GPS , 2表示DGPS),nn(卫星数),P(水平位置定位精度因子),h, h(海平面的天线高),m.,g.g(椭球面上的天线高),m,xxx(为DGPS有效数据期),aaaa (DGPS基准站的编号),ss(校验和),< CR>回车<LF>换行
由于接收到的卫星数据存在星历误差,电离层误差,对流层误差以及随机噪声等,为了提高定位的精度,需要对卫星定位数据作差分算法的处理[4]。
为了消除随机噪声和动态噪声对定位结果的影响,在数据处理之前先要对定位数据进行滤波平滑。下面给出所采用的卡尔曼滤波方法的说明。
(1)动态方程
 式中,PRC为校正后的伪距;PRm为测量到的
式中,PRC为校正后的伪距;PRm为测量到的
OSEKturbo 实时操作系统 ABS Internet GIS 相关文章:
- 嵌入式OSEK配置器的设计与实现(10-13)
- 基于车载自组网络模式的小车互联模型设计方案(10-27)
- 基于XC164的六通道ABS开发板设计(11-25)
- 本田(HONDA)奥德赛(ODYSSEY)轿车电路—防抱死制动控制系统(上)(11-30)
- 本田(HONDA)奥德赛(ODYSSEY)轿车电路—防抱死制动控制系统(中)(11-30)
- 楔式制动器设计提高了线控刹车的性能(01-04)