TMS320F2812型DSP在车辆四轮转向控制系统中的应用
时间:07-19
来源:
点击:
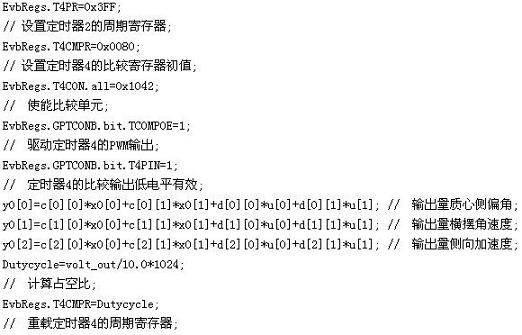
部分程序设计过程如下:
算法的基本思路是:4WS启动时,输入一前轮转角,通过横摆率反馈,将其与速度相关的理想横摆率稳态响应增益G0进行比较,然后经控制器G1控制后轮转角,实现四轮转向,输出质心侧偏角、横摆率、侧向加速度用于监测,控制框图如图5所示。电机的驱动电压由DSP的比较寄存器产生PWM信号,在通过D/A 转换电路输出。本文采用定时器4产生PWM,由DA4引脚输出,一级放大的D/A转换电路如图6所示。
部分程序设计过程如下:
本文应用上面设计的控制算法对4WS车辆进行了基于TMS320F2812型DSP硬件在环仿真,车辆参数选为:m=1740kg;I= 3214kg.m2;a=1.058m;b=1.756m;K1=29000N/rad;K2=60000N/rad;同时为简便起见,截取速度u= 30m/s,结果如图7所示,结果表明横摆率跟踪控制的4WS车辆在高速范围的转向操控时其质心横摆率、侧偏角和侧向加速度响应相比两轮转向能够保持较好动态和稳态性能,同时采用CCS2000进行调试开发,周期短、成本低。因此,基于DSP的硬件控制系统在工业控制和汽车控制领域具有广阔前景。
图7 仿真结果
TMS320F2812 DSP 四轮转向 控制系统 相关文章:
- 基于OBDⅡ汽车远程监测系统的研究(05-23)
- 基于DSP的车轮踏面擦伤检测系统(10-11)
- 另类传感器观念:汽车传感器(11-30)
- 汽车内部噪声智能控制系统的设计(11-28)
- 电源分配结构的三大转变为电源管理技术开创新局面(01-10)
- 基于MCU和DSP的步进电机控制技术(01-10)