一种汽车电动式转向器的电控系统设计
时间:02-21
来源:中国电子设计网
点击:
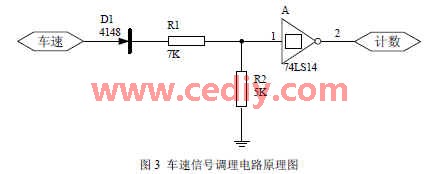
过程中的正反馈作用,可以把边沿变化缓慢的周期性信号变换为边沿很陡的矩形脉冲信号。根据以上原理设计的车速信号调理电路如图3。
4.2 前轮转角信号调理电路
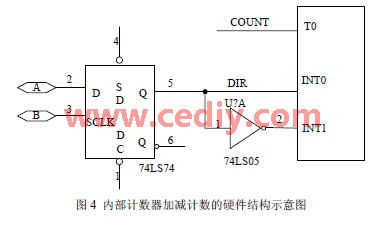
根据旋转编码器的工作原理,当方向盘转角发生变化时光电编码器便会发出A、B 两路相位差90°的数字脉冲信号。正转时A 超前B 为90°,反转时B 超前A 为90°。脉冲的个数与角度值成比例的关系,所以通过对脉冲的计数就可以得到方向盘转角的大小。考虑到汽车方向盘转动是双向的,既可顺时针旋转,也可逆时针旋转,需要对编码器的输出信号进行鉴相后才能计数。
我们可以把经过D 触发器之后的脉冲即方向控制脉冲(DIR)接到单片机的外部中断INT0 端,经过反向器后再接到另一个外部中断INT1,并把计数脉冲A 接到单片机的片内计数器T0 端即可。相对外部计数芯片来说,使用这种方法时电路相对要简单得多。系统工作时,先要把两个中断设置成低电平触发,并打开相应的中断。当DIR 高电平时,表示方向盘顺时针旋转,INT1 中断,执行相应的中断程序,进行加计数;而当DIR 低电平时,表示方向盘逆时针旋转,INT0 中断,执行相应的中断程序,进行减计数(实际是重赋值,进行加计数)。图4 为内部计数器加减计数的硬件结构示意图。
4. 3 液压缸位移信号调理电路
电控系统中需要时刻检测后轮转角的当前值,与目标转角值比较,得出偏差e( t),生成PWM 信号,直到偏差e (t)在允许范围内。后轮转角的测量是通过测量液压缸的位移值间接得到。位移信号属于模拟信号,P89C52 单片机中没有A/D 转换模块,需外接A/D 转换电路。采用8 位的AD678 来完成。AD678 的优点在于它的模拟信号输入的极性非常容易控制,且引脚连接简便。
4.4 驱动执行硬件电路设计
4.4.1 比例电磁阀驱动电路
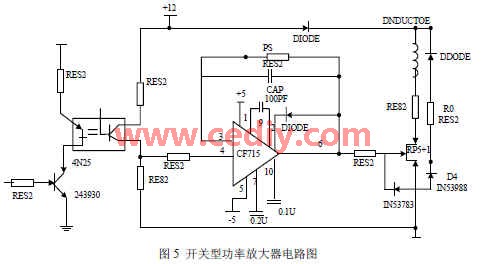
通常单片机输出的开关电压信号最大值为 5V,且根据MCS-51 系列芯片输出的电气性能可知,其输出电流不宜超过15mA,不足以驱动比例阀的电磁铁。故必须要有一个驱动功率放大器,把开关电压信号加以放大,使在电磁线圈中产生足够的激磁电流。对于比例方向阀,为了加快电磁线圈的电流响应速度,必须采用快速驱动电路,即电流的增长和消退都非常迅速的电路。本文采用如图7 所示的VMOS 功率场效应管为主构成功率放大器电路原理图。该电路驱动功率大,响应时间在毫秒级,单片机与功率级之间隔离良好。在电路图5 中,输入部分和输出部分采用两套相互独力的电源,且不共地,没有电气联系,从而实现了电气隔离。
4.5 其它外围电路设计
4.5.1 电源电路
电源模块是将车载电源通过 DC/DC 变换转换成控制系统所需要的电压,车载电源为12V或24V,单片机系统工作电压为5V。DC/DC 转换器种类繁多,本系统采用78L00 系列的78L05进行降压。78L00 系列DC/DC 转换器电路简单实用,只需要另加两个电容就可以构成转换电路。78L05 的输入范围为7V-24V,输出电压为5V。
4.5.2 复位电路
在一般的计算机系统中,为防止系统在加电、电源突然掉电以及电网瞬时欠压而引起误动作,需要有可靠的复位电路和电源监视电路。
本文作者创新点
本文针对多轴转向系统实时多任务特性,提出了基于CAN 总线的多轴转向技术,以确保车辆在转向状态下的安全稳定性及后桥转向的快速跟随特性;论文设计了包括主控模块和控制执行模块在内的多轴转向电控单元。
参考文献:
[1] 陈思忠, 舒进, . 电液比例控制多轮独立转向技术研究[J]. 重庆交通学院学报,2004(4):97-99.
[2] 南金瑞,刘波澜.汽车单片机及车载总线技术[M].北京:北京理工大学出版社,2005.10.
[3] 刘梅.基于CAN 总线的汽车车身控制系统的研究与设计[D].合肥工业大学硕士学位论文,2005.6.
[4] 邱晓初. 基于单片机的涡卷式空压机电控系统设计[J]. 微计算机信息, 2007, 5-2: 101-103
作者简介:
杨国军(1973-),男,汉族, 江西丰城人,讲师,从事机电方面的教学和研究
通信地址:江西省新余市新余高等专科学校工程系 338031
Email: jxxyzw@126.com
钟卫(1963-),男,汉族, 江西分宜人,副教授,从事机电方面的教学和研究
4.2 前轮转角信号调理电路
根据旋转编码器的工作原理,当方向盘转角发生变化时光电编码器便会发出A、B 两路相位差90°的数字脉冲信号。正转时A 超前B 为90°,反转时B 超前A 为90°。脉冲的个数与角度值成比例的关系,所以通过对脉冲的计数就可以得到方向盘转角的大小。考虑到汽车方向盘转动是双向的,既可顺时针旋转,也可逆时针旋转,需要对编码器的输出信号进行鉴相后才能计数。
我们可以把经过D 触发器之后的脉冲即方向控制脉冲(DIR)接到单片机的外部中断INT0 端,经过反向器后再接到另一个外部中断INT1,并把计数脉冲A 接到单片机的片内计数器T0 端即可。相对外部计数芯片来说,使用这种方法时电路相对要简单得多。系统工作时,先要把两个中断设置成低电平触发,并打开相应的中断。当DIR 高电平时,表示方向盘顺时针旋转,INT1 中断,执行相应的中断程序,进行加计数;而当DIR 低电平时,表示方向盘逆时针旋转,INT0 中断,执行相应的中断程序,进行减计数(实际是重赋值,进行加计数)。图4 为内部计数器加减计数的硬件结构示意图。
4. 3 液压缸位移信号调理电路
电控系统中需要时刻检测后轮转角的当前值,与目标转角值比较,得出偏差e( t),生成PWM 信号,直到偏差e (t)在允许范围内。后轮转角的测量是通过测量液压缸的位移值间接得到。位移信号属于模拟信号,P89C52 单片机中没有A/D 转换模块,需外接A/D 转换电路。采用8 位的AD678 来完成。AD678 的优点在于它的模拟信号输入的极性非常容易控制,且引脚连接简便。
4.4 驱动执行硬件电路设计
4.4.1 比例电磁阀驱动电路
通常单片机输出的开关电压信号最大值为 5V,且根据MCS-51 系列芯片输出的电气性能可知,其输出电流不宜超过15mA,不足以驱动比例阀的电磁铁。故必须要有一个驱动功率放大器,把开关电压信号加以放大,使在电磁线圈中产生足够的激磁电流。对于比例方向阀,为了加快电磁线圈的电流响应速度,必须采用快速驱动电路,即电流的增长和消退都非常迅速的电路。本文采用如图7 所示的VMOS 功率场效应管为主构成功率放大器电路原理图。该电路驱动功率大,响应时间在毫秒级,单片机与功率级之间隔离良好。在电路图5 中,输入部分和输出部分采用两套相互独力的电源,且不共地,没有电气联系,从而实现了电气隔离。
4.5 其它外围电路设计
4.5.1 电源电路
电源模块是将车载电源通过 DC/DC 变换转换成控制系统所需要的电压,车载电源为12V或24V,单片机系统工作电压为5V。DC/DC 转换器种类繁多,本系统采用78L00 系列的78L05进行降压。78L00 系列DC/DC 转换器电路简单实用,只需要另加两个电容就可以构成转换电路。78L05 的输入范围为7V-24V,输出电压为5V。
4.5.2 复位电路
在一般的计算机系统中,为防止系统在加电、电源突然掉电以及电网瞬时欠压而引起误动作,需要有可靠的复位电路和电源监视电路。
本文作者创新点
本文针对多轴转向系统实时多任务特性,提出了基于CAN 总线的多轴转向技术,以确保车辆在转向状态下的安全稳定性及后桥转向的快速跟随特性;论文设计了包括主控模块和控制执行模块在内的多轴转向电控单元。
参考文献:
[1] 陈思忠, 舒进, . 电液比例控制多轮独立转向技术研究[J]. 重庆交通学院学报,2004(4):97-99.
[2] 南金瑞,刘波澜.汽车单片机及车载总线技术[M].北京:北京理工大学出版社,2005.10.
[3] 刘梅.基于CAN 总线的汽车车身控制系统的研究与设计[D].合肥工业大学硕士学位论文,2005.6.
[4] 邱晓初. 基于单片机的涡卷式空压机电控系统设计[J]. 微计算机信息, 2007, 5-2: 101-103
作者简介:
杨国军(1973-),男,汉族, 江西丰城人,讲师,从事机电方面的教学和研究
通信地址:江西省新余市新余高等专科学校工程系 338031
Email: jxxyzw@126.com
钟卫(1963-),男,汉族, 江西分宜人,副教授,从事机电方面的教学和研究
- 车用柴油机电控系统的设计(07-09)
- CAN总线混合动力汽车电控系统的设计与实现(08-29)
- 气动发动机的电控系统设计(08-15)
- 汽车MEMS应用领域(01-22)
- 另类传感器观念:汽车传感器(2)(11-30)
- 满足汽车高温应用环境要求的传感器接口IC(01-10)