基于模糊PD控制的电动助力转向系统建模及仿真分析
时间:02-19
来源:半导体应用
点击:
5 结论
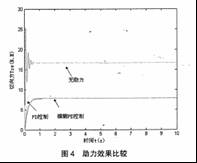
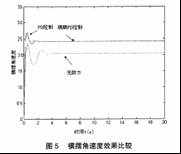
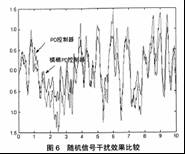
显然,PD控制助力系统的输出响应要比无助力系统平稳模糊自调整PD控制助力系统的输出响应最为平稳,抗干扰能力较强。其仿真结果表明,这种模糊自调整PD控制器具有较好的控制效果和鲁棒性,抗干扰能力显著提高。通过对控制器中系数Kp和Kd的在线调整,这种模糊自调整PD控制器,较好地解决了转向系统中的轻便与灵敏的矛盾,协调了汽车操纵轻便性和驾驶员能获得充分路感的关系。
EPS 相关文章:
- 汽车电动助力转向系统电控单元的研究(01-31)
- 常见的动力转向系统详解(04-28)
- 汽车电动助力转向系统EPS原理详解(06-05)
- 采用PIC16F877的汽车电动助力转向系统(06-29)
- 基于英飞凌产品的汽车EPS技术方案(03-20)
- 汽车电动助力转向系统的研究与方案(02-11)