驾驶员辅助系统-自适应巡航控制系统(上)
时间:01-05
来源:Texas Instruments Rainer Troppmann
点击:
 注:前轮驱动的汽车
注:前轮驱动的汽车
ASR=加速滑移控制(牵引控制)
ESP=电子稳定系统(电子稳定控制)
调频连续波雷达系统
现有的自适应巡航控制系统大多采用毫米波雷达系统,其中又以调频连续波技术(FMCW)应用最为广泛。FMCW雷达系统能同时探测出目标相对于车辆的距离和速度。若安装适当数量的天线,它们还能计算出目标与车辆的纵轴夹角。
在调制周期内(tm),调频连续波雷达的发射频率会以线性方式在频率偏移范围内(调制范围,fh)不断改变。下图A是包含三段斜波的发射信号频率曲线。在发射机和目标都未移动的静态系统中(见图B),接收信号的频率会落后于发射信号,其频率差与发射机和物体之间的距离成正比。将发射信号和接收信号混频会产生频率较低的中频信号,该中频的最大值就叫做差拍频率(fb)。
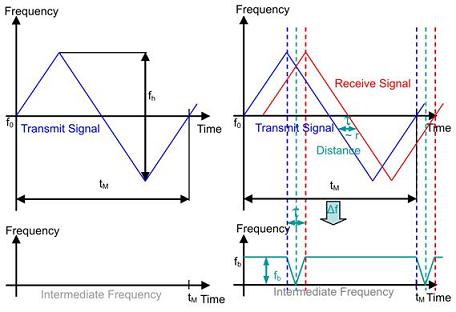
图A、图B
如果物体相对于发射机在移动,接收信号的频率就会因为多卜勒效应而改变。物体接近时,接收信号的频率会升高,物体远离时则降低。若忽略发射机与物体的距离,以相对速度vrel接近就会产生如下图C中的接收信号,此时中频fd保持不变。将图B与图C中的频率曲线相加在一起即可得到一个完整接收信号,它的中频信号包含发射机与目标之间的距离和相对速度等信息(见图D)。
图C、图D
下图E和图F为发射机与物体以相对速度vrel远离时的频路曲线。
图E、图F
中频可由调频连续波雷达方程式表示成距离r和相对速度vrel的函数,其中相加代表发射机与目标逐渐接近,相减则代表逐渐远离。
当c=光速
本文的另一部分讨论ACC系统的硬件和软件实现,以及雷达功能和算法。- 倒车雷达主控芯片GM3101的功能特性分析(01-24)
- 技术教程:驾驶员辅助系统-自适应巡航控制系统(下)(01-05)
- 利用高速ADC设计用于汽车的LIDAR系统(02-23)
- FMCW毫米波防撞雷达系统(04-09)
- 专家解答网友提问 如何选购倒车雷达(06-08)
- 汽车倒车雷达系统的设计与实现(06-13)