伺服电机及伺服驱动系统远程控制,问题再多也有套路!
系统软硬件设计
1系统硬件设计
本文设计采用USBCAN和伺服驱动设备和PC机来搭建硬件平台。伺服驱动控制芯片采用的是DSP的芯片。
系统硬件搭建按以下步骤进行。首先在TI的开发环境中配置好的相关参数,并建立DS301工程项目,完成CANopen协议通信程序的调试运行。项目调试成功之后下载到驱动器中,在上位机界面中设置报文,测试SDO、PDO、NMT等通讯对象。测试结果正确则系统硬件搭建完成。
2系统软件设计
整个伺服控制的软件设计在CCS中建立,主要包括永磁同步电机的闭环控制程序和CANopen协议找的实现两大部分。如图3所示为软件设计流程图。
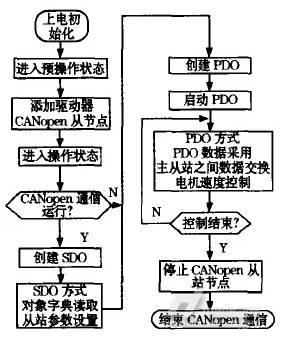
图3 软件设计流程图
初始化部分程序主要完成DSP系统的初始化以及CANopen通讯的初始化。
初始化主要完成的工作如下:
初始化相关变量,使能全局中断,进人伺服电机编码器霍尔传感器反馈UVW三路信号来判断电机初始电角度位置。
初始化通讯的主要完成的工作如下:
设置从站节点地址和CAN通信波特率,初始化各通对象,完成各路的预定义映射,最后进入通信处理程序。
3伺服控制报文设置
CANopen报文结构由11位的COB-ID以及最多8字节的数据域构成。在上位机界面中通过NMT报文设置控制从站进入预作状态或者运行状态,再通过SDO报文设置伺服控制的各个参数(速度、位置等)以及状态机的各个状态可以使电机按照不同控制模式运转起来,最后通过将电机的当前参数映射到PDO中,读取PDO报文的值得到电机当前值,将其与设置值对比得到控制结果的正确性。控制报文全部由SDO实现。
以下为PP模式控制、PV模式控制和HM模式控制报文列表:
1.PP模式控制报文列表

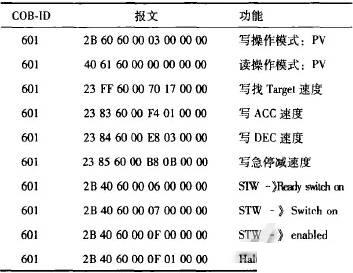
2.PV模式控制报文列表
3.HM模式报文列表
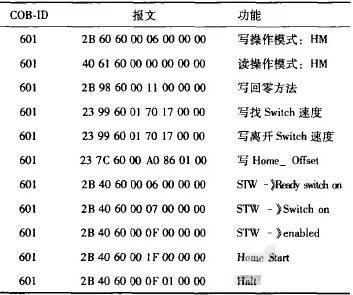
以上三种控制模式报文操作都是首先设置伺服控制模式,然后根据当前模式依次输入相关的目标控制值(如位置、速度、回零方式等),最后按照状态机步骤使用6040h控制电机启动与停止。
仿真实验
本系统的上位机界面由USBCAN的上位机界面及电机的监控界面两部分构成,其中USBCAN的上位机界面作为CANopen报文数据监控界面,电机的监控界面用VB2008开发。在上位机界面中通信波特率选用1Mbps伺服电机Node-ID设置为1,心跳周期为1s,TPDO发送周期为100ms,同时设置好电机电流环、位置环、速度环的参数,将设置的报文依次输入上位机界面的SDO控制,电机启动并运行到报文中的设定值,电机手动遥控器显示值与设定值一致,同时上位机界面中报文显示值也与设定值一致,成功实现了伺服控制的控制。
1PP模式
电机监控界面中位置控制曲线如下图4所示:
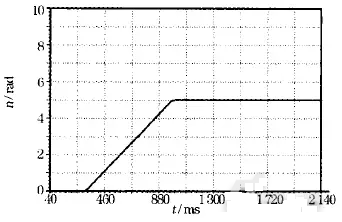
图4 电机位置控制曲线
在上位机界面中设置好报文值,电机启动。电机先加速运行,达到设定的目标速度值后开始匀速运行,直至达到设定的目标位置值就不再变化。上位机过程数据与电机监控曲线变化一致。如果需要改变电机的位置值,在上位机界面中依次输人新的控制报文,电机会根据设定值正转或者反转,继续运行到新的位置。
2PV模式
电机首先加速到设定的目标速度值,然后按照设疋值勾速运打。如果需要改变运行的速度,同样可在上位机界面中输人新的速度值,加速时的变化如上所述。减速控制时,电机减速直至速度为则停止。如图5所示为上位机数据变化与电机监控曲线变化一致速度控制曲线。
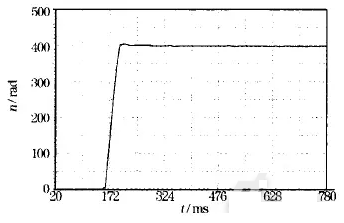
图5 电机速度控制曲线图
3HM模式
电机先加速到设定速度,然后寻找原点位置,找到原点后,电机回零,减速直至这时分别在上位机界面以及电机的手动遥控器伺服电机中査看电机的当前位置值,都可以看到电机的当前设为说明电机回零操作完成。如图6所示为位置控制曲线图。
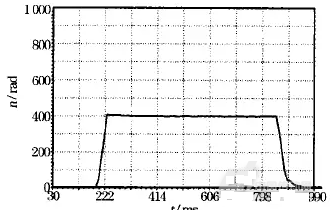
图6 位置控制曲线图
结 论
在实际应用应用过程中,本文所设计的系统运行可靠,数据准确易分析,机先加速运行,达到设定的目标速度值后开始匀速实时性好,协议栈程序易植入。该方法可以扩展适用于多电机控制系统,而且的CANopen通信协议栈适用于所有设备,在工程应用应用领域非常广泛。
- 工业机器人的“心脏” 伺服电机未来出路在哪里?(04-08)
- 大联大世平集团推出高精度运动控制系统解决方案(09-16)
- 雅特生科技推出适用于列车控制系统和信号系统的ControlSafeTM 小型车载系统平台(08-22)
- 智能照明还能折腾出什么花样(10-25)
- 2016四大挑战,给大功率LED驱动控制系统加点压(01-04)
- 信号调理模块的原理与应用(06-14)