基于 DSP 的电子负载----电子负载控制器的设计
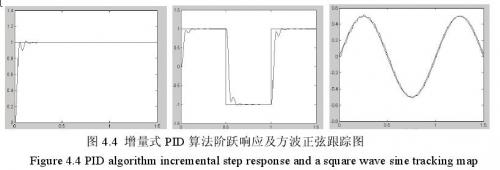
(2)积分分离PID控制算法
积分环节的应用是为了消除静差,提高控制精度。但是过程的启动、结束或大幅度的增减设定时,短时间内系统输出有很大的偏差,会造成PID运算的积分积累,致使控制量超过电子负载执行机构可能允许的动作范围最大值,有可能引起系统较大的超调,甚至引起系统较大的振荡,在调试过程是不允许的。
积分分离的思路是,当被控量与设定值偏差较大时,取消积分作用;当被控量接近给定值时,引入积分控制。首先根据所设计电子负载实际情况,认为设定个阈值,恒流模式下,设定阈值ε=0.4(低档位)/3(高档位);恒压模式下,设定阈值ε=4(低档位)/15(高档位)。其次,当|error ( k )|>ε时,采用PD控制,可避免产生过大的超调量,又可使系统有较快的响应。|当error ( k )|≤ε,采用PI控制,以保证系统的控制精度。
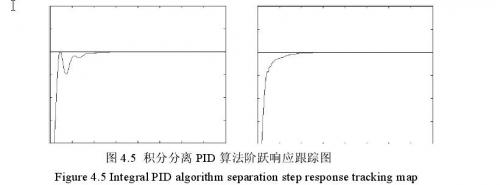
积分分离控制算法可表示为:

式子4.6中,T为电子负载控制环时间,β为积分项的开关系数

采用积分分离PID处理的电子负载,在阶跃响应,方波和正弦跟踪仿真如图4.5所示。由由仿真结果可知,采用积分分离法,在阶跃响应大幅增减时,取消积分作用,消除了对偏差的积累,减少了不必要的振荡,系统的稳定性有了很大的提高。
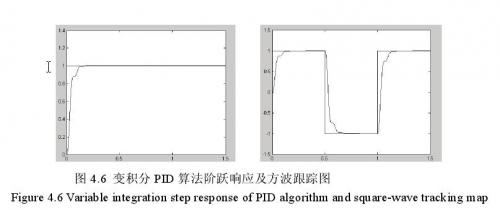
(3)变积分PID控制算法
在普通的PID控制算法中,由于积分系数是常数,所以在整个控制过程中,积分增量不变。而系统对积分项的要求是,系统偏差大时积分作用应减弱甚至全无,而在偏差小时则应加强。积分系数取大了会产生超调,甚至积分饱和,取小了又迟迟不能消除静差。因此,如何根据系统偏差大小改变积分速度,对于提高系统品质是很重要。变速积分PID可较好的解决这一问题。变速积分PID的基本思路是,设法改变积分项的累加速度,使其与偏差大小相对应:偏差越大,积分越慢;反之则越快。
积分饱和是指系统存在一个方向的偏差,PID控制器的输出由于积分作用的不断累加而加大,从而使执行机构达到极限位置,若控制器输出继续增大,系统的输出超过正常运行的范围而进入饱和区。进入饱和区越深则退出饱和区所需的时间愈长。此时若执行机构不能随偏差反向做出相应的改变,系统就会像失去控制一样。
是变积分PID算法同样可以防止积分饱和的方法。在电子负载系统计算输出量时。计算u(k)时,首先考虑上一时刻的输出控制量是否已经超过了限制的范围。
若超过执行机构最大值若u(k-1)> umax,则只累积负偏差,若没有超出最大值,u(k-1)< umax则积累正偏差,从而避免控制量长时间停留在饱和区。
采用变积分PID算法处理的电子负载,阶跃响应,方波跟踪如图4.6所示。
(4)参数的整定
概括起来有两大类:一是理论计算法,依据系统的数学模型,经过理论计算确定控制器参数。建立模型不仅困难,其中的大量简化也使模型失真,脱离实际情况,即使得到模型,这种方法所得到的计算数据未必可用。二是工程整定方法,它主要依赖工程经验,直接在控制系统的试验中进行,且方法简单、易于掌握,工程应用中被广泛采用。
PID控制器参数的工程整定方法,主要有临界比例法、反应曲线法和衰减法。三种方法各有其特点,其共同点都是通过试验,通过闭环运行或模拟,观察系统的响应曲线,然后根据各参数对系统的影响,凑试不同的参数直至出现理想的响应曲线。
- 基于 DSP 的电子负载----功率电路设计和采样电路设计(01-17)
- 基于 DSP 的电子负载----电子负载系统设计方案(01-17)
- 基于 DSP 的电子负载----硬件和软件功能的分配和协调(01-17)
- 基于 DSP 的电子负载---- 系统调试及结果分析(01-23)
- 基于 DSP 的电子负载:电子负载控制系统软件设计(01-23)
- 基于 DSP 的电子负载:模糊自适应整定 PID 控制策略(01-23)