基于 DSP 的电子负载----电子负载控制器的设计
第4章电子负载控制器的设计
前面内容论述了电子负载的整体框架和各部分的软硬件功能,电子负载的核心控制电路是信号板上MOSFET负载电流环,其目的在于实时检测输入电压,调整负载电流。因此,本章对电子负载的负载电流的控制技术来阐述。
首选工程上广泛应用的PI控制器作为电子负载的数字控制器,然后针对其不足,分别对积分分离PID控制器和抗积分饱和PID控制器,进行了研究和仿真测试,为进一步解决PI控制器的鲁棒性差和精度不高的问题,设计了自适应模糊PID控制器,运用模糊数学的基本理论和方法,把模糊控制规则有关的信息(如评价指标、初始实验PID参数等)存入知识库中,使系统的能够根据实际的响应情况,运用模糊推理,自动实现对PID参数的最佳调。
4.1电子负载数字控制方案简介
电子负载的数字化与智能化的关键在于控制电路的模块数字化和控制功能软件化,性能强劲价格低廉的DSP的出现,数字化技术而得到飞速的发展,使得复杂的控制方法可以通过软件的方式实现,数字控制也成为应用控制理论的必然途径,各式各样的反馈控制方法也被相继用于改善电子负载的瞬时和稳态响应,就目前应用较多的数字控制方式介绍如下:
(1)PID控制,是最早发展起来的控制策略,由于其算法简单、鲁棒性好及可靠性高,广泛的用于过程控制和运动控制,尤其适用于建立精确数学模型的确定性系统。实际的非线性时变系统,使常规的PID控制器难以达到理想的控制效果,所以需要引进先进的PID控制,如数字PID控制、模糊PID控制、专家PID控制等等。
(2)迟滞控制,是一种以误差比较为基础的边边控制(band-band)系统,根据误差的正负产生的最大修正信号。这种控制方法的优点是简单并不需要知道被控对象的动态模型,缺点是开关频率难以掌握,且在相同频率下涟波较大。
(3)死击控制,数字系统也可以说是取样数据控制系统,也就是说,每隔固定一段时间,控制系统就会根据命令与反馈计算出适当的控制信号。死击控制设计过程明确、方法简明,可以迅速减低误差,但是必须掌握被控对象的动态特性,而且其控制能量会随取样的周期缩短而骤增。
(4)反复控制,利用控制器长时间累积的误差信息来抑制外界的干扰所产生的误差的系统,该控制方法将反馈控制的立足点由瞬间变化量的抑制延伸到长时间的稳态误差消除,可在系统在不可知的扰动下,输出值迅速平滑的保持在设定值附近,对控制精度的提高有很大的益处。缺点在于需要考虑系统的稳定性和收敛速度,重复控制在消除剧烈的负载变化状况时,容易造成系统的稳定度减低。本课题的研究中主要采用了基于DSP的数字PID控制算法,其实现框图如图4.1所示。
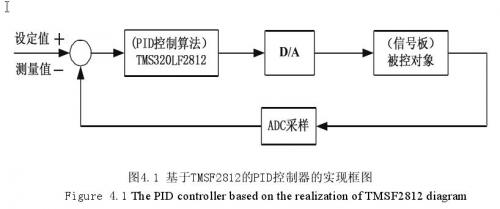
DSP在电子负载中充当了PID控制器的角色,数字PID控制是通过DSP内部的程序来实现的,因此它的灵活性很大,一些原来模拟PID控制器中无法实现的问题,在DSP的软件里都可以得到解决,于是可以产生一系列的改进算法,形成非标准的控制算法,来改善系统的品质,满足控制系统的需要。
4.2基于PID控制策略研究
在工程实际中,应用最为广泛的比例、积分、微分控制简称PID控制,又称PID调节,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。将偏差的比例(P)、积分(I)和微分(D)通过线性组合构成控制量,用这一控制量对被控对象进行控制,这种控制器就是PID控制器。传统的模拟PID控制都是应用在连续时间控制系统,如下图4.1所示。
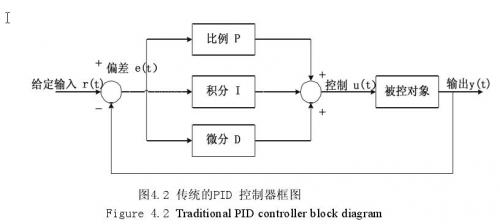
图4.2中r(t)是电流没定值,y(t)电子负载的实际测量值,e(t)是输入控制器的偏差信号,u(t)是控制器输出的控制量,则PID控制算式如下式(1)所示:

其中:KP是比例系数,T1是积分时问常数,TD是微分时问常数。
(1)增量式PID控制算法
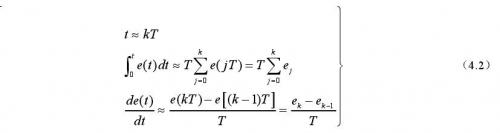
上式是模拟形式的PID控制算式,现在采用TMSLF2812实现数字PID控制,DSP控制是一种采样控制,它只能根据采样使可得偏差计算控制量,而不能像模拟控制那样连续的输出控制量,进行连续控制,上式中的积分和微分项不能直接使用,必须进行离散化处理。离散化处理的方法为:以T作为采样周期,K作为采样序号,则离散采样时间KT对应连续时间t,用求和的形式代替积分,用增量的形式代替微分,可作如式4.2所示变化。
将上式代入4.1式中就可得离散的PID表达式:

如果采样周期取的足够小,则以上的近似计算可获足够的精确结果,离散控制过程与连续控制过程十分接近。为增加控制系统的可靠性,采用增量式PID控制算式,即让TMSF2812只输出控制量的增量△u(k)。式4.3是第k次PID控制器的输出量,那么第k-1次PID控制器的输出所以增量式PID控制算式如式4.4所示:

4.3式和4.4式相减得方程4.5就是本控制程序中用到的增量式PID控制算式:
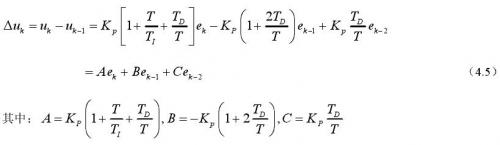
由式4.5可以看出,如果基于DSP电子负载控制系统采用恒定的采样周期T,一旦确定了A、B、C,只要前后三次测量的偏差,就可求出控制量。增量式PID控制与位置式PID控制相比仅是算法上有所改变,它只是改变输出增量,而且控制的增量仅与最近的采样有关,这样减少了DSP误操作时对控制系统的影响,而且不会产生积分失控[29]。下图4.3是数字PID控制Simulink模块图。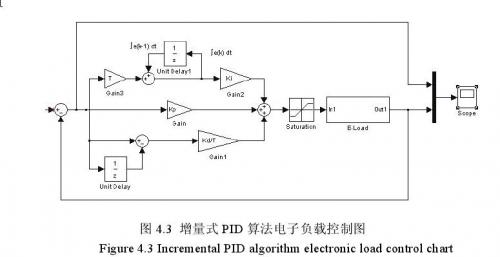
采用增量式数字PID算法的电子负载,阶跃响应,方波和正弦跟踪如图4.4所示
- 基于 DSP 的电子负载----功率电路设计和采样电路设计(01-17)
- 基于 DSP 的电子负载----电子负载系统设计方案(01-17)
- 基于 DSP 的电子负载----硬件和软件功能的分配和协调(01-17)
- 基于 DSP 的电子负载---- 系统调试及结果分析(01-23)
- 基于 DSP 的电子负载:电子负载控制系统软件设计(01-23)
- 基于 DSP 的电子负载:模糊自适应整定 PID 控制策略(01-23)