MPU6050什么叫姿态角啊?
时间:10-02
整理:3721RD
点击:
什么叫姿态角啊?是某时刻某状态的角度吗?
①在地面上选一点Og
②使Xg轴在水平面内并指向某一方向
③Zg轴垂直于地面并指向地心(重力方向)
④Yg轴在水平面内垂直于Xg轴,其指向按右手定则确定
机体坐标系(Aircraft-body coordinate frame)Sb-------OXYZ
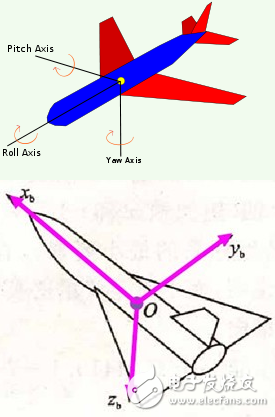
①原点O取在飞机质心处,坐标系与飞机固连
②x轴在飞机对称平面内并平行于飞机的设计轴线指向机头
③y轴垂直于飞机对称平面指向机身右方
④z轴在飞机对称平面内,与x轴垂直并指向机身下方
欧拉角/姿态角(Euler Angle)

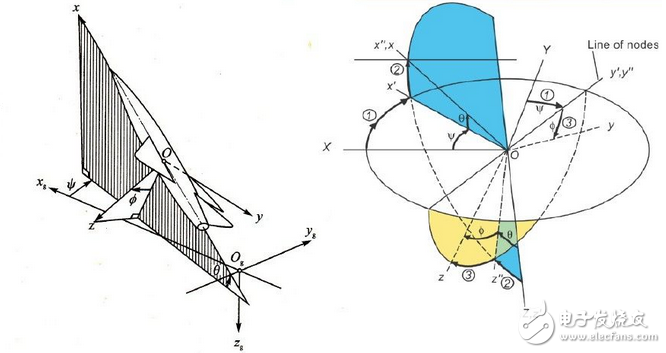
机体坐标系与地面坐标系的关系是三个Euler角,反应了飞机相对地面的姿态。
俯仰角θ(pitch):机体坐标系X轴与水平面的夹角。当X轴的正半轴位于过坐标原点的水平面之上(抬头)时,俯仰角为正,否则为负。

偏航角ψ(yaw):
机体坐标系xb轴在水平面上投影与地面坐标系xg轴(在水平面上,指向目标为正)之间的夹角,由xg轴逆时针转至机体xb的投影线时,偏航角为正,即机头右偏航为正,反之为负。

滚转角Φ(roll):机体坐标系zb轴与通过机体xb轴的铅垂面间的夹角,机体向右滚为正,反之为负。

姿态角(Euler角)pitch yaw roll
飞行器的姿态角并不是指哪个角度,是三个角度的统称。
它们是:俯仰、滚转、偏航。你可以想象是飞机围绕XYZ三个轴分别转动形成的夹角。
地面坐标系(earth-surface inertial reference frame)Sg--------OXgYgZg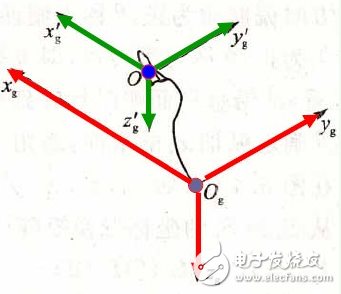
①在地面上选一点Og
②使Xg轴在水平面内并指向某一方向
③Zg轴垂直于地面并指向地心(重力方向)
④Yg轴在水平面内垂直于Xg轴,其指向按右手定则确定
机体坐标系(Aircraft-body coordinate frame)Sb-------OXYZ
①原点O取在飞机质心处,坐标系与飞机固连
②x轴在飞机对称平面内并平行于飞机的设计轴线指向机头
③y轴垂直于飞机对称平面指向机身右方
④z轴在飞机对称平面内,与x轴垂直并指向机身下方
欧拉角/姿态角(Euler Angle)
机体坐标系与地面坐标系的关系是三个Euler角,反应了飞机相对地面的姿态。
俯仰角θ(pitch):机体坐标系X轴与水平面的夹角。当X轴的正半轴位于过坐标原点的水平面之上(抬头)时,俯仰角为正,否则为负。
偏航角ψ(yaw):
机体坐标系xb轴在水平面上投影与地面坐标系xg轴(在水平面上,指向目标为正)之间的夹角,由xg轴逆时针转至机体xb的投影线时,偏航角为正,即机头右偏航为正,反之为负。
滚转角Φ(roll):机体坐标系zb轴与通过机体xb轴的铅垂面间的夹角,机体向右滚为正,反之为负。
怎样才可以精确地算出这个角度呢
姿态角可以分解为3个角,Pitch(俯仰角),roll(横滚角),Yaw(航向角), 你可以这样想象,你在地面站直,向前向后倒为Pitch,向左或向右为Roll,向45(不是在x轴,或y轴)就是航向角
非常的形象啊啊非常的形象啊啊非常的形象啊啊
四轴的姿态,真让人头疼
非常的形象啊啊非常的形象啊啊非常的形象啊啊
666666666666