第二篇----勘察现场,制定计划
时间:10-02
整理:3721RD
点击:
《瓦力》里的MO应该是保洁实现人工智能化的终极目标,看到一个如此有洁癖的机器人,有时候都惭愧,科幻毕竟是科幻,我们可以朝着那个方向迈上一小步,相信我们的后人会实现这种既幽默又爱干净的高科技,就像我们已经实现了先人嫦娥奔月的梦想。

先来看看家里的地形,看看机器人会在什么环境下工作。简单绘制了一张草图,空白部分是过道,阴影部分有的是障碍,有的是墙壁,有的是柜子,有的是桌子腿儿撒的。过道基本没有障碍,可能有个垃圾桶撒的,没有网线电线造成羁绊,平地无楼梯没有“坠崖”危险,桌子腿柜子腿离地20厘米左右,倒是可能成为卡住机器人的潜在威胁,地面一般无水,地板砖材质,光滑平整有一定摩擦力。
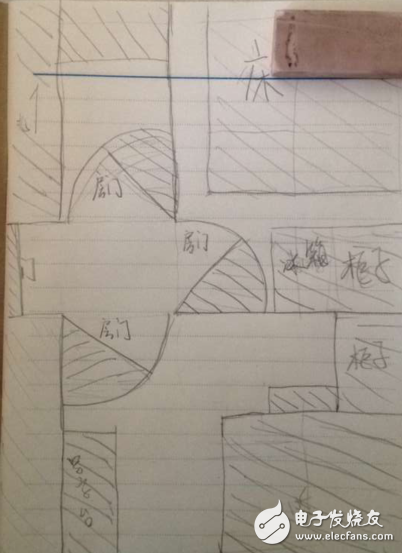
这样看来,潜在危险只有柜子底下,机器人要有一个合适的高度,可以钻到柜子下拖地,且不被卡住,还要有一套运动机制,可以从柜脚与墙壁形成的角落里转出来,尽管被堵在角落里的几率较小。
先给我们的项目起个名字吧,按照流行的趋势,以MO为名,就叫“MO梦计划”吧。计划的终极目标,就是打造出一款,会洗盘子会洗碗,会擦玻璃会拖地,会洗衣服会聊天,以还世界一片清洁为使命的人工智能机器人。限于时代的局限性,先实现部分功能,就是先会拖地。
我们把“MO梦计划”中实现拖地这个初级阶段,命名为“MO梦计划之C行动”,很简单“初”拼音,chu。
那么“C行动”是分三步走来实现的,
第一步是根据理论公式 扫地机器人=拖把+车+自动驾驶,完成拖把与车的基本框架的组装,
第二步是手动遥控控制实现对地面的清洁功能,实现 扫地机器人=拖把+车+手动驾驶,
第三步是将自动驾驶这个最体现智能的元素融合进去。
好,MO梦计划之C行动,Action!
先来看看家里的地形,看看机器人会在什么环境下工作。简单绘制了一张草图,空白部分是过道,阴影部分有的是障碍,有的是墙壁,有的是柜子,有的是桌子腿儿撒的。过道基本没有障碍,可能有个垃圾桶撒的,没有网线电线造成羁绊,平地无楼梯没有“坠崖”危险,桌子腿柜子腿离地20厘米左右,倒是可能成为卡住机器人的潜在威胁,地面一般无水,地板砖材质,光滑平整有一定摩擦力。
这样看来,潜在危险只有柜子底下,机器人要有一个合适的高度,可以钻到柜子下拖地,且不被卡住,还要有一套运动机制,可以从柜脚与墙壁形成的角落里转出来,尽管被堵在角落里的几率较小。
先给我们的项目起个名字吧,按照流行的趋势,以MO为名,就叫“MO梦计划”吧。计划的终极目标,就是打造出一款,会洗盘子会洗碗,会擦玻璃会拖地,会洗衣服会聊天,以还世界一片清洁为使命的人工智能机器人。限于时代的局限性,先实现部分功能,就是先会拖地。
我们把“MO梦计划”中实现拖地这个初级阶段,命名为“MO梦计划之C行动”,很简单“初”拼音,chu。
那么“C行动”是分三步走来实现的,
第一步是根据理论公式 扫地机器人=拖把+车+自动驾驶,完成拖把与车的基本框架的组装,
第二步是手动遥控控制实现对地面的清洁功能,实现 扫地机器人=拖把+车+手动驾驶,
第三步是将自动驾驶这个最体现智能的元素融合进去。
好,MO梦计划之C行动,Action!
小编 这个是原创的嘛
?
是呀是呀,我只是懒得不想天天扫地上的毛儿了
欢迎注水
DIY力挺。自己动手丰衣足食