步进电机控制模块设计
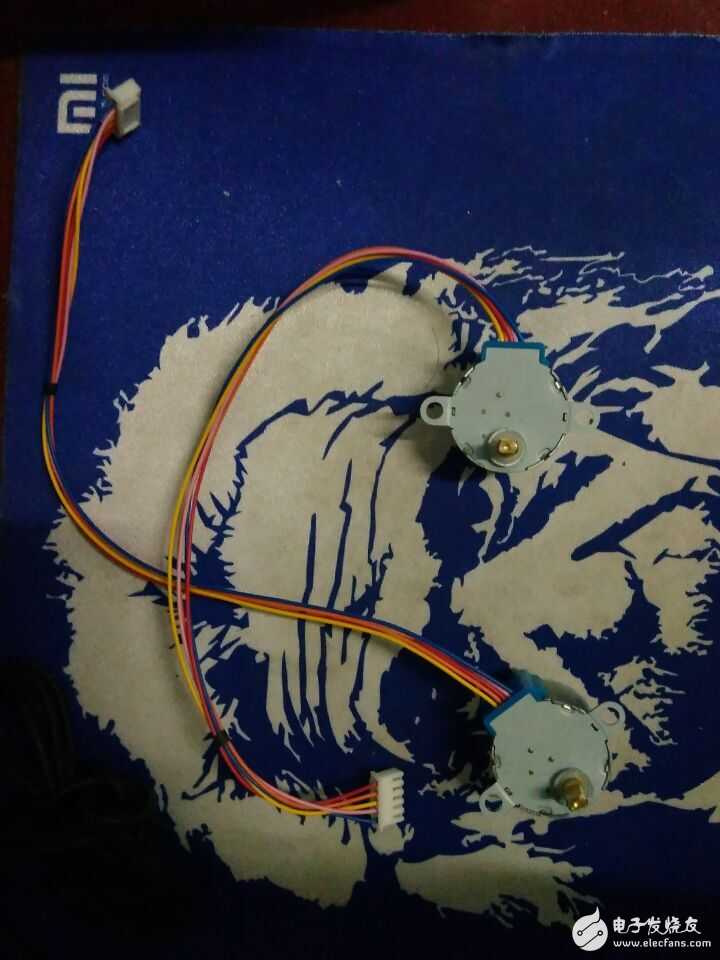
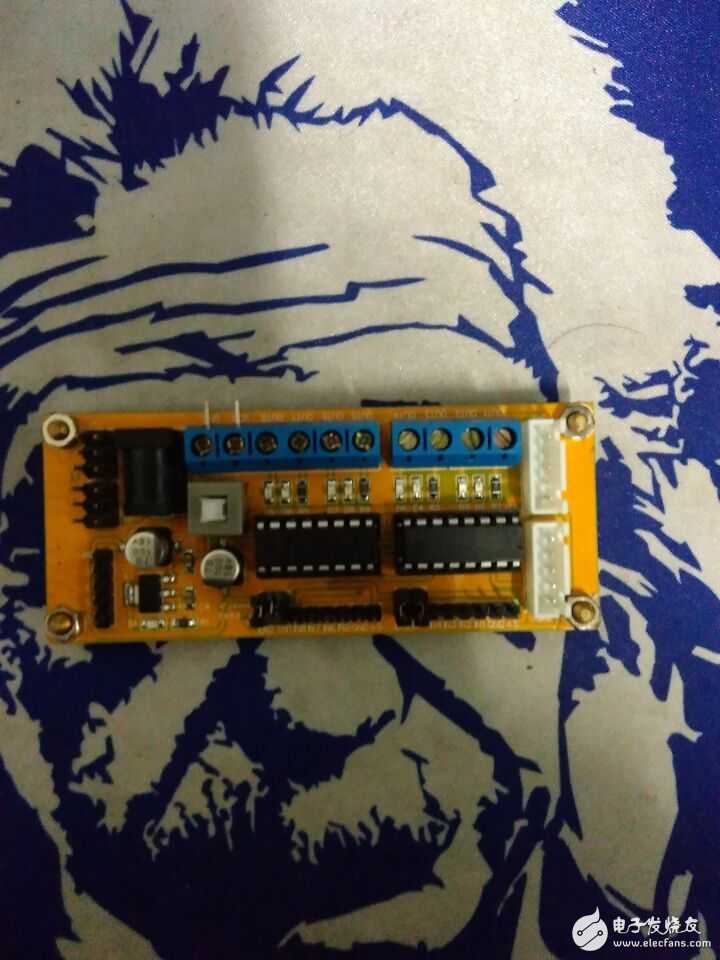
本系统是一种按仰角(太阳高度)和方位角(太阳方位)分别控制调节的太阳跟踪控制系统。采用通过DSP计算发出脉冲,控制步进电机的转动角度,实现对太阳的自动跟踪,使跟踪装置始终处于与发光源垂直的最佳位置。系统选用两台42BYGH型步进电机,并以AT89C2051单片机和功率放大器L293D为主组成了配套的步进电机驱动控制模块。
步进电机是一种将电脉冲转化为角位移的执行机构。通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。您可以通过控制脉冲个来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电动机的运行,要靠功率驱动电源来驱动。对步进电动机的运行控制,如启动、停止、正转、反转、定位等,均要由步进电动机控制系统来实现。本系统的步进电机驱动控制模块主要由步进控制器和驱动器两部分组成,其中步进控制器,由单片机实现,而驱动器则是把单片机输出的脉冲加以放大,以驱动步进电机。选用集成芯片 L293D 作为功率放大器,按照一个 L293D 驱动一个电机的工作方式,以单片机的 IO 口提供控制信号,用来驱动四相步进电机的转动。
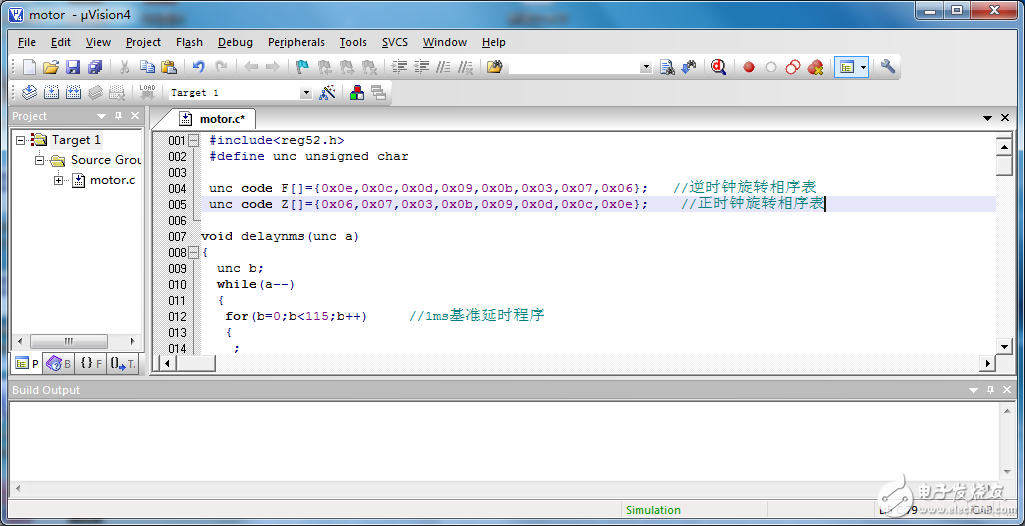
其中,AT89C2052单片机对步进电机的的控制模式为串行控制,即发送脉冲信号控制步进电机的运动,发送脉冲方向信号控制步进电机的运动方向(即正、反转)。

进入Keil 编写程序。
将写好的程序烧写到单片机内。

感谢小编分享,学习了!
6666666666666666666666
支持!好东西,找了好久了!谢谢!