无位置传感器的直流无刷电机控制系统设计与实现
图3是根据前述控制原理设计的基于DSP的直流无刷电机控制系统。该系统主要由直流无刷电机、功率变换器电路、电机转子位置检测电路、各种保护电路以及以TMS320LF240x为核心的数字控制器等构成,其中功率变换器电路由整流滤波电路、逆变器电路(IPM功率模块)和相应的保护电路组成。
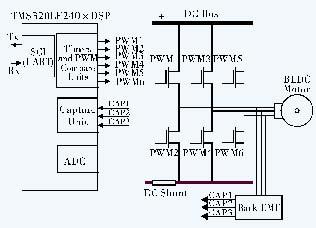
图3DSP控制系统
逆变器电路中的IPM模块集成了多种保护功能,如过电压保护、欠电压保护以及过流保护等,当达到保护阈值时,IPM模块通过FO引脚输出一个低电平信号,并将此低电平信号送入DSP的PDPINTx引脚,触发功率驱动保护中断,将所有PWM输出引脚设置为高阻态,以此来关断驱动信号,起到保护电路的作用。
转子位置检测电路采用1/2电压采样法来实现,对电机的三相端电压及直流母线电压分别进行采样,并将采样结果送入比较器进行比较,从而得到过零点的时刻,其结果送入DSP的捕捉端口中。
2.3DSP控制系统的软件设计
本控制系统采用速度、电流双闭环的控制结构。由于采用了面向电机控制的高速DSP,无论是速度环的设计,还是电流环的实现,以及各种反馈信号的处理和PWM控制信号的产生,均采用了数字信号处理技术,用软件实现硬件电路的功能,完成直流无刷电机的实时控制。
控制系统的软件设计主要包括DSP初始化程序和电机控制程序两部分。DSP初始化程序主要完成系统时钟的设定,中断向量的定义,I/O端口的初始化,控制寄存器的设置以及各功能模块的初始化等;电机控制程序主要负责电机的启动控制、速度电流双闭环控制、系统监控和故障处理等,因此电机控制程序包括启动子程序、电流和位置检测中断服务子程序、速度控制子程序、电流控制子程序、PWM调制子程序以及系统监控和故障处理子程序等。
进行各种反馈信号的检测是构成双闭环控制的前提。位置信号、电流信号的检测分别由位置检测中断服务程序和电流检测中断服务程序来实现,转速的检测通过软件计算间接获得。为了提高系统的动态性能和稳态精度。其控制环路简图如图4所示。
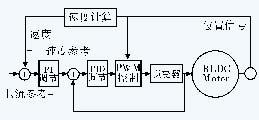
图4电流和速度控制环路
PWM调制子程序根据检测到的转子位置信号和电流信号通过事件管理器(EV)产生PWM调制信号。通过定时器控制寄存器TxCON中的位模式将通用定时器的计数模式设置为连续增/减计数模式以产生对称的PWM波形。
2.4电机的启动方案
由于直流无刷电机在静止及低速运行时难以正确检测反电势信号,因此必须解决电机在静止状态下启动的问题。以往曾有多种启动方法,但有的要增加复杂的启动电路,有的则要与电机特性联系密切,,实现起来难度较大、且可靠性较低。
本系统采用三段式的方法单纯利用软件来实现电机启动,将电机的启动过程分为预定位、强制运行与同步切换三个阶段。在电机静止时,转子的初始位置未知,需要给设定的两相电枢绕组通以短暂的电流,使转子磁极稳定在这两相绕组合成磁场的轴线上,以此作为转子磁极初始位置(即预定位)。然后按定、转子磁极间正确的空间相位关系使相应的功率器件导通,并以固定的时间进行模式切换,在这段时间内反电势幅值较小,不宜进行过零检测。
3实验结果
将前述控制方案应用在直流变频空调压缩机系统上进行实验验证,电机极对数为2,PWM载波频率设为5kHz,最大输出功率为2kW,调速范围为15~~110Hz.实验证明,该系统启动平稳,调速控制系统实时性好,具有良好的控制性能。图5是无刷直流电机三相电压的波形,图6是无刷直流电机三相电流的波形,从波形图中可以看出,输出波形具有较高的质量,从而表明该系统采用的控制策略和算法的可行性和和实用性。
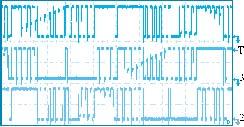
图5三相电压波形
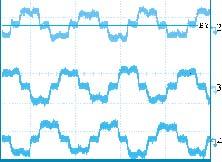
图6三相电流波形
4结语
直流无刷电机具有效率高、功率密度大、功率因数高、体积小、控制精度高等优点,其应用范围非常广泛。直流无刷电机的控制技术正在从传统的有位置传感器的闭环PID控制过渡到无位置传感器的智能控制,其调速范围、转矩脉动、系统鲁棒性等性能都在不断提高。
在充分利用了TMS320LF240x的强大实时计算能力和片内丰富的集成器件的基础上,设计了基于DSP的无位置传感器直流无刷电机的控制方案,并给出了控制系统的软、硬件结构。该控制系统具有良好的控制性能和调速性能,可以获得较好的动态特性和较高的稳态精度,运行效率高,抗干扰能力强,具有较高的实际应用价值。
- 传感器和致动器正成为元器件市场新热(03-12)
- 图像传感器市场突破60亿美元,CMOS将占主导地位(05-22)
- 超低功率“智能尘埃”创新无限,无线传感器技术继续高歌猛进(05-22)
- 电化学气体传感器核心技术见突破(05-26)
- 日本工业机器人选中Cognex视觉传感器作为标准组件(04-14)
- 欧姆龙索能发力通用传感器市场,上海成立合资公司(05-08)